
Extras din curs
A. PROIECTAREA SISTEMELOR AUTOMATE LINIARE
Proiectarea sistemelor automate necesită în practică mai multe etape iterative de modelare, proiectare, simulare, testare şi implementare. Proiectarea depinde de mai mulţi factori dintre care unul important este determinat de faptul că sistemul automat face parte dintr-un echipament produs în scopuri comerciale.
Inginerul de instalaţii se poate găsi în una dintre următoarele situaţii:
- inginerul de instalaţii participă la dezvoltarea sistemului incă de la început. De multe ori în aceste situaţie se impun performanţe numai în regim staţionar de funcţionare. Nu se cunoaşte modelul (dinamic) al procesului, astfel că dificultăţile apar mai târziu, în exploatarea sistemului.
- inginerul acordează (stabileşte parametrii) sistemul de conducere în funcţiune pentru a îndeplini criteriile de performanţă prevăzute cât mai bine posibil. Această fază necesită o înţelegere profundă a modului de funcţionare a sistemelor cu reacţie negativă şi a posibilităţilor de intervenţie.
- inginerul întreţine şi îmbunătăţeşte funcţionarea instalaţiei. Necesitatea îmbunătăţirii provine din mai multe direcţii. Pot apare, de exemplu, echipamente noi cu posibilităţi mai bune de conducere sau se modifică legislaţia de protecţie a mediului înconjurător.
- inginerul realizează studii de prognoză asupra perspectivelor de dezvoltare a instalaţiilor conduse.
Într-o sarcină tipică de proiectare sunt necesare cunoaşterea scopurilor sistemului, precum şi a modelului matematic pentru toate elementele şi a relaţiilor dintre ele [1]:
- Identificarea instalaţiei conduse. Este o operaţie de sine stătătoare, în urma căreia rezultă modelul matematic al procesele din instalaţie care constituie obiectul conducerii cu ajutorul automatelor şi/sau regulatoarelor. Trebuiesc cunoscute bilanţurile energetice şi fluxurile de masă din sistem. Dimensiunile fizice ale echipamentului şi modul în care acestea influenţează performanţele sistemului sunt de asemenea importante şi trebuiesc înţelese. Toate aceste cunoştinţe trebuiesc incluse într-un model al procesului condus şi care va fi rafinat (îmbunătăţit, completat) pe parcursul fazelor de proiectare.
- Scopurile conducerii. Ce trebuie să se obţină? Reducerea energiei consumate, un confort sporit, etc. Care sunt variabilele care trebuiesc controlate pentru atingerea acestor obiective. Care este nivelul de performanţă necesar (suprareglare admisibilă, durata regimului tranzitoriu).
- Traductoarele. Performanţele unui sistem nu pot fi mai bune decât traductoarele folosite.
- Elementele de execuţie. Sunt importante atât organele de reglare, cât şi servomotoarele (prea lente sau rapide, fiabilitatea);
- Comunicaţiile dintre componente. Interconectarea traductoarelor, elementelor de execuţie, automatelor şi regulatoarelor se face prin intermediul sistemului de comunicaţie. O clădire mare sau o uzină necesită ca mii de semnale să fie transmise la distanţe relativ mari, până la 1000 m. Transmiterea datelor în timp real necesită controlul riguros al întârzierilor spre deosebire de transmiterea semnalelor vocale. Există tendinţa în creştere de a folosi conexiunile tip Ethernet pentru transmisiile de date în conducerea automată. Totuşi acestea nu sunt potrivite în acest scop deoarece modul lor de funcţionare presupune că atunci când apare imposibilitatea conectării se încearcă reluarea transmisiei ceva mai târziu cu o întârziere aleatoare. De aceea, pentru automatizări locale, semnalul unificat 2-10 mA sau 4-20 mA îşi păstrează importanţa, datorită faptului că valoarea semnalului NU depinde de distanţa de transmitere (dimensiunea buclei de curent).
- Algoritmii de conducere [1] şi calculele necesare implementării lor. Metoda de conducere este influenţată decisiv de metodele de calcul numeric sau analogic folosite. Dacă alegerea traductoarelor, elementelor de execuţie şi sistemului de transmisie este influenţată puternic de consideraţii tehnologice şi econonice, algoritmul şi implementarea lui oferă mult mai multe grade de libertate în efortul de a asigura performanţele dorite ale sistemului de conducere. Din păcate algoritmii necorespunzători pot conduce nu numai la micşorarea performanţelor dar şi la instabilitatea sistemului automat.
- Arhitectura sistemului şi dispozitivele de interfaţare. La o primă vedere se poate aprecia sistemul conducerii centralizate la care toate traductoarele şi elementele de execuţie sunt conectate la un singur echipament de conducere este cea mai bună soluţie deoarece se bazează pe toate informaţiile disponibile. Totuşi aceasta este rareori cea mai bună soluţie în practică datorită problemelor provocate de complexitate, preţ de cost, intârzierilor mari datorate comunicaţiei şi timpilor de calcul, fiabilităţii şi întreţinerii. Uneori aceste probleme pot fi evitate printr-o arhitectură corespunzătoare. Un exemplu în acest sens îl constituie folosirea structurii tip feed–forward la conducerea automată a instalaţiilor din clădiri şi locuinţe.
- Perturbaţiile posibile. Unul dintre scopurile principale al automatizării îl constituie micşorarea influentei perturbaţiilor de diferite tipuri, cum ar fi de exemplu variaţiile de sarcină ale instalaţiilor. Din păcate perturbaţiile au un caracter aleator pronunţat şi caracteristicile lor sunt puţin cunoscute. Este cu totul remarcabil că în aceste condiţii sistemele automate bine proiectate reuşesc să atenueze puternic efectul lor.
- Incertitudinea modelelor folosite. Conducerea automată poate fi mai bună dacă se cunoaşte mai bine sistemul condus. Aceasta nu este cazul în practică şi faptul că totuşi automatizarea funcţionează bine în multe cazuri este un fapt cu totul remarcabil. Metodele moderne de proiectare pun un accent tot mai mare pe robusteţea sistemului automat, adică pe caracteristica sa de a fi puţin sensibil la schimbări ale procesului condus. O explicaţie de ultimă oră constă în opţiunea de auto-tuning pe care o au regulatoarele automate.
B. ANALIZA SISTEMELOR AUTOMATE
Prelucrarea semnalelor (Signal Processing) pentru stabilirea anumitor performanţe sau prognoza unor evenimente presupune reprezentarea lor în domeniul timp sau frecvenţă. Un semnal periodic poate fi reprezentat ca o sumă (serie Fourier) de componente sinusoidale. Un grafic care reprezintă valoarea amplitudinii sinusoidelor în funcţie de frecvenţă sau pulsaţie, reprezintă o prezentare a semnalului în domeniul frecvenţă.
Pentru toate sistemele liniare, inclusiv cele automate, se aplică principiul superpoziţiei conform căruia efectul unei sume de cauze aditive este egal cu suma efectelor provocate de fiecare cauză în parte. Din această cauză comportarea sistemelor ca răspuns la semnale de intrare complexe poate fi studiată ca o sumă a comportărilor pentru diferite semnale sinusoidale de intrare. Acesta este studiul sistemelor în domeniul frecvenţă.
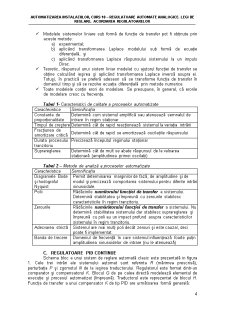
În continuare se prezintă câteva caracteristici ale sistemelor automate determinate în domeniul timp, tab.1 şi în domeniul frecvenţă, tab.2.
Analiza sistemelor automate în domeniul timp şi analiza în domeniul frecvenţă sunt în mare echivalente. Aceste analize prezintă unele particularităţi, avantaje şi dezavantaje care sunt menţionate în continuare [1], însoţite de comentarii suplimentare.
ü Analiza sistemelor automate în domeniul timp este avantajoasă pentru metode experimentale, deoarece rezultatul este intuitiv şi interpretabil direct.
ü Analiza în domeniul frecvenţă este avantajoasă prin metode manuale, folosind calculul simbolic (grafic).
Preview document














Conținut arhivă zip
- Regulatoare Automate Analogice. Legi de Reglare.doc
Alții au mai descărcat și

Comunicatii Internet în LabVIEW Diversele versiuni succesive ale mediului de programare grafic LabVIEW si-au adus fiecare contributia la oferirea...
Caracteristicile echipamentelor periferice Caracteristici funcţionale si constructive II) Caracteristici externe a) caracteristici de interfaţă...
CURS 1 Limbajul HTML Noţiuni introductive Word Wide Web este un serviciu de acces la informaţia stocată pe un calculator aflat oriunde în lume....
Codul de bare este un cod binar aranjat ca un câmp de bare şi goluri, într-o configuraţie paralelă, după un model prestabilit. Acest cod reprezintă...

Cap. 1. SISTEME PIPELINE Tehnica pipeline reprezintă o metodă de îmbunătătire a performantelor unui procesor sau a unei unităti aritmetice....

Cap 1. Reprezentarea informaţiilor 1.1 Reprezentarea numerelor întregi în sistemul binar Un număr natural se reprezintǎ ca o colecţie de cifre....

CAPITOLUL 3 MODELAREA SISTEMELOR DINAMICE CU EVENIMENTE DISCRETE UTILIZÂND ALGEBRA (max, +) 3.1 Introducere În acest capitol vom prezenta...

Descrierea metodei Se considera sistemul descris de urmatoarea ecuatie cu diferente (S) A yt B u t D × ( ) = × ( )+ × e( t ) 1 , (1) unde:...
Te-ar putea interesa și

Capitolul 1.Introducere 1.1. Instalatia Festo Compact Workstation Această staţie a fost dezvoltată şi produsă in scopul formarii profesionale şi...

Introducere Un sistem hibrid este compus dintr-un proces continuu, modelat printr-un set de ecuaţii liniare şi tratat ca un SDED (Sistem Dinamic...

1.Introducere Automatica este ramura stiintei care se ocupa cu studiul metodelor si mijloacelor prin intermediul carora se asigura conducerea...

Introducere Automatizarea unui proces tehnologic constă în dotarea instalației în care acesta se desfășoară cu mijloace tehnice necesare și...

1. Obiectul lucrării În industrie există procese lente cu funcţii de transfer care au constante de timp mari care pot să ajungă la zeci de minute...

Argument Omul, ca fiinţă superioară, a fost preocupat din cele mai vechi timpuri de a cunoaşte şi stăpâni natura, de a dirija fenomene ale naturii...

A. OBIECTUL ŞI IMPORTANŢA AUTOMATIZĂRII Mecanizarea proceselor de producţie — reprezentând introducerea maşinilor şi mecanismelor în cadrul...

CAPITOLUL I Notiuni generale • Principii constructive Regulatorul este acel element din cuprinsul SRA la intrarea caruia se aplica eroarea sau...