Cuprins
- 1. Introducere 0.5
- 2. Principii 3.5
- 2.1. Cerinte impuse sistemelor de control 0.5
- 2.2. Controlul in bucla deschisa si inchisa 2
- 2.3. Tipuri de senzori 1
- 3. Sisteme de control pentru MAS destinate tractiunii rutiere 10
- 3.1. Obiective si mijloace de realizare 1
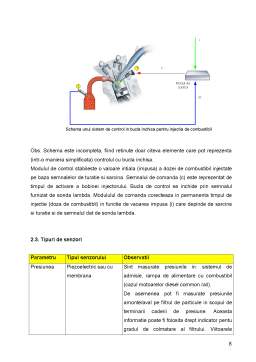
- 3.2. Controlul sistemului de injectie de combustibil 3
- 3.3. Controlul sistemului de aprindere 2
- 3.4. Functii auxiliare 1
- 3.5. Conditii particulare impuse de utilizarea combustibililor alternativi 1.5
- 3.6. Elemente de calcul 1.5
- 4. Sisteme de control pentru MAC destinate tractiunii rutiere 11
- 4.1. Obiective si mijloace de realizare 2
- 4.2. Controlul dozei de combustibil injectate 4
- 4.3. Controlul avansului la injectia de combustibil 2
- 4.4. Functii auxiliare 1
- 4.5. Elemente de calcul 2
- 5. Sisteme de control pentru motoare destinate altor tipuri de aplicatii 3
- 5.1. Sisteme de control pentru motoare stationare 1.5
- 5.2. Sisteme de control pentru motoare navale 1.5
- TOTAL ORE = 28
Extras din curs
1. Introducere
Cursul de fata isi propune sa prezinte principiile de control si principalele sisteme aplicate in cadrul motoarelor cu ardere interna. Cunoasterea lor reprezinta o cerinta esentiala pentru intelegerea functionarii motoarelor actuale. Chiar daca notiunea de control nu trebuie neaparat legata de motoarele de ultima generatie, cu siguranta ea a capatat o semnificatie aparte in cazul acestora.
Dezvoltarea sistemelor de control a fost impulsionata in primul rind de severitatea normelor privind emisiile poluante si de cerinta unor performante satisfacatoare in conditiile respectarii acestor norme.
Primul pas a fost realizat prin introducerea masiva a sistemelor electronice de control in motoarele cu aprindere prin scinteie dotate cu sistem catalitic pentru tratarea gazelor de ardere. Functionarea cu randament maxim a unui astfel de sistem impunea mentinerea stricta a coeficientului de dozaj intr-o fereastra foarte ingusta in jurul valorii unitare. Acest obiectiv a fost realizat prin introducerea sistemelor de injectie de benzina controlate electronic. Treptat sistemele au fost dezvoltate, astfel pe linga controlul calitatii amestecului aer-combustibil a fost integrat si controlul avansului la scinteie.
Motoarele diesel au fost si ele supuse unor puternice schimbari in privinta sistemelor de control, chiar daca cu o usoara intirziere fata de motoarele pe benzina. Motivele care au stat la baza acestei evolutii sint legate de utilizarea motorului diesel cu injectie directa la funtionarea pe autoturisme. Acest motor prezinta un mare avantaj: economicitatea. In acelasi timp motorul este zgomotos si prezinta un nivel ridicat al emisiei de NOx. Electronica a fost cea care a reusit sa controleze procesul de injectie intr-o maniera eficienta cu efecte benefice asupra zgomotului si emisiilor poluante.
In prezent, indiferent de tipul motorului, sistemele de contol gestioneaza procesele esentiale (injectie, aprindere), dar si interactiunea cu alte sisteme: transmisie, climatizare, etc.
2. Principii
Scopul unui sistem de control: mentine parametrii unui motor intr-un anumit interval specificat . Sensul care trebuie acordat expresiei “parametrii unui motor” este larg. De exemplu, prin parametrii unui motor putem intelege:
• turatia motorului (cind se discuta de controlul stabilitatii motorului la functionarea la mers in gol);
• avansul la declansarea scinteii (cind se discuta de controlul functionarii motorului la limita de detonatie);
• avansul la injectia de motorina (cind in cazul unui motor diesel se discuta despre limitarea zgomotului);
• nivelul unei anumite emisii poluante (sau a unui set de emisii poluante);
• cuplul sau puterea efectiva;
• etc
In structura unui sistem de control pot fi individuate intotdeauna trei componente:
• Senzorul (senzorii) = este cel care obtine informatii asupra variabilei controlate.
• Modulul de control (elementul de calcul) = Calculeaza parametrii actiunii de control pe baza informatiilor primite de la senzor (senzori).
• Elementul comandat (actuator) = primeste comanda de la procesor si intervine asupra marimii controlate.
Obs. Notiunea de modul de contol sugereaza imaginea unui sistem electronic. Analizind din punct de vedere istoric evolutia sistemelor de control, vom constata ca primele erau totalmente mecanice. Este suficient sa ne gindim la un regulator centrifugal. Cursul de fata se axeaza pe studiul sistemelor actuale, in care prezenta cel putin a unui modul de control (electronic) este absolut necesara.
Proiectarea unui sistem de control presupune o cunoastere aprofundata a functinarii sistemului respectiv. In practica putem aplica solutii standard care, desi nu ne absolva de necesitatea cunoasterii sistemului controlat, pot facilita semnificativ realizarea controlului.
Cea mai comuna metoda o constituie realizarea unui controler PID (P = proportinal, I = integral, D = derivativ). Acest tip contine toate cele trei componente care permit realizarea unui control eficient:
Termenul proportional caracterizeaza viteza de raspuns: o constanta de proportionalitate cu valoare mare poate diminua timpul de raspuns, dar in acelasi timp accentueaza caracterul instabil al sistemului.
Termenul integral elimina posibilitatea de eroare in conditii stationare.
Termenul derivativ asigura adaptarea rapida a semnalului de control la o schimbare rapida a erorii. Acest termen are un rol de amortizare a semnalului de control.
Preview document







































Conținut arhivă zip
- 00 structura cursului.doc
- 01 introducere.doc
- 02 principii.doc
- 03 mas tractiune rutiera.doc
- cap3pag30-32.doc
- cap3pg26-29.doc
- curs 4 CE.doc
- curs 5 CE.doc
Alții au mai descărcat și

Introducere Automatizarea unui proces tehnologic constă în dotarea instalației în care acesta se desfășoară cu mijloace tehnice necesare și...

Introducere Turbina auto are o istorie aproape la fel de veche ca și cea a motorului cu combustie internă. Între anii 1885-1886 Gottlieb Daimler...

Sisteme de alarmare de in caz de efractie si incendiu Componentele unui sistem de alarma. Bazandu-se pe aceste lucruri, sistemele de alarma...

1.Tema proiectului Modul de laborator pentru studiul comunicatiei radio pe 868 MHz. Se va proiecta un modul de laborator pentru studiul unui...

26.1. CIRCUITE CU PARAMETRI REPARTIZAŢI În capitolele precedente s-au studiat circuite electrice filiforme, formate din elemente de circuit...

CAPITOLUL I SURSE DE SEMNAL Comunicaţiile au un spectru extrem de larg, semnalele transmise prin sistemele de comunicaţii reprezentând...

1. Etapele procesului de proiectare a sistemelor de automatizare Sistemele de conducere automatizate pot fi realizate: • în logică cablată • în...

Semiconductoare: materiale solide sau lichide cu o conductivitate electrică intermediară între materialele conductoare şi cele izolatoare...
Te-ar putea interesa și

Noţiuni introductive Definiţie: Se numeşte motor cu combustie internă orice dispozitiv care obţine energie mecanică direct din energie chimică...

INTRODUCERE În studiu pe care autorul îl propune spre prezentare, intitulat ,,Regimul juridic al controlului fiscal”, se intenţionează să se...

1.Notiuni generale introductive 1.1 Aspecte introductive Injectia de combustibil. Introducerea combustibilului lichid sub presiune, in camera de...

Capitolul 1. Introducere 1.1 Introducere în proiect Titlul lucrării este „Vehicule Autonome - Sisteme de asisten.ă de menținere a benzii de...

CAPITOLUL I. 1.1. Destinaţia navei şi caracteristicile generale Cargoul pentru mărfuri generale este nava maritimă destinată transportului...

Argument Atenţia persoanelor contemporane este tot mai des atrasă de ceea ce numim tehnologie de ultimă oră. Memoria flash este o tehnologie...

Capitolul 1 Introducere Revoluția informatică (a doua revoluție industrială) a marcat saltul de la societatea industrializată la societatea...

Sistemul de suspensie al autovehiculului Audi TT Coupé 2007 Noul Audi TT este o maşină sport pur-sânge. Sistemul său de suspensie este unul din...