Extras din curs
1. Schema cinematica a manipulatorului
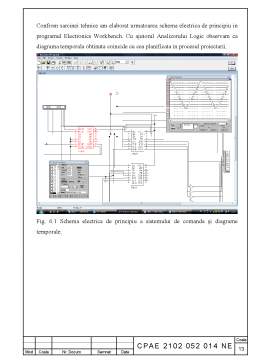
Schema cinematica reprezinta succesiunea si combinarea articulatiilor si elementelor de miscare a manipultorului. In baza schemei cinematice se determina miscarile de baza si zonele de lucru ale manipulatorului.
In sarcina pentru prezentul proiect de curs a fost propus urmatorul index de mobilitate Tx-Rz-Ty. Astfel de inscriere se interpreteaza in felul urmator:
Tz- miscare de translatie de-a lungul axei z
Rx- miscare de rotatie in jurul axei x
Ty- miscare de translatie de-a lungul axei y
Conform indexului de mobilitate, construim schema cinematica.
Fig.1.1 Schema cinematic a manipulatorului
2. Descrierea succesiunii miscarilor a elementelor manipulatorului
Conform sarcinei, manipulatorul efectueaza urmatoarele miscari:
- Miscare de translatie in de-a lungul axei z cu 1m
- Miscare de rotatie in jurul axei x cu 180 grade
- Miscare de transaltie de- a lungul axei y cu 1 m
Pentru comoditate vom incepe descrierea miscarii de lucru de la ultima articulatie, care asigura deplasarea de-a lungul axei Y. Mișcările sunt efectuate luînd în considerație procesul tehnologic stabilit, în cazul dat sfredelirea.
Deci, are loc o deplasare a manipulatorului cu 1 m de-a lungul axei Y, urmeaza o rotatie in jurul axei X cu 90 grade; ultima mișcare este de-a lungul axei Z cu 1m în care are loc sfredelirea.
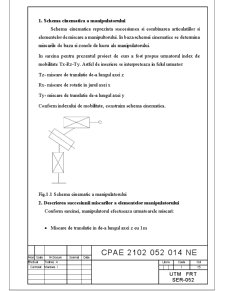
3. Determinarea formei dimensiunilor si amplasarii zonei de lucru.
Zona de lucru prezinta in sine punctele spatiului, care sunt atinse cu organul de lucru. In baza schemei cinematice, determinam zona de lucru a manipulatorului, incepind procedura de la ultima articulatie.
Realizind deplasarile si rotatiile manipulatorului obtinem ca zona de lucru un plan cu lățimea l= 1 m, inaltimea h=1m.
Fig.2.1 Zona de lucru a manipulatorului cu punctele de lucru.
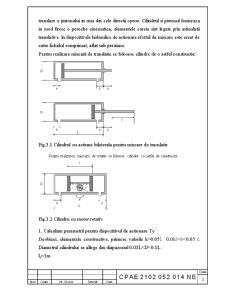
Pentru realizarea miscarilor, in calitate de dispozitiv de actionare, in manipulator se folosesc cilindrele cu actiune bilaterala, care asigura mobilitatea de translare a pistonului in una din cele directii opuse. Cilindrul si pistonul formeaza in mod firesc o pereche cinematica, elementele careia sint legate prin articulatii translative. In dispozitivele hidraulice de actionare efortul de miscare este creat de catre lichidul comprimat, aflat sub presiune.
Pentru realizare miscarii de translatie se folosesc cilindre de o astfel constructie:
Fig.3.1 Cilindrul cu actiune bilaterala pentru miscare de translatie
Pentru realizarea miscarii de rotatie se folosesc cilindre cu astfel de constructie
Preview document












Conținut arhivă zip
- Proiectarea Manipulatorului Robotului Industrial.doc
Alții au mai descărcat și

Jonctiunea p-n la echilibru termic. În practica se utilizeaza numeroase dispozitive electronice obtinute prin alaturarea de regiuni...

Tranzistoare MOS cu canal initial Sunt dispozitive electronice la care conductia curentului are loc la suprafata semiconductorului respectiv....

Vibratiile sunt fenomene dinamice care iau nastere în medii elastice sau cvasielastice, datorita unei excitatii locale, care se manifesta prin...

Notiuni fundamentale : Viteza, prin definitie, este o marime vectoriala. Daca directia (suportul) de deplasare a corpului în miscare este data,...

Elemente sensibile pneumatice pentru controlul dimensional Controlul dimensional este un domeniu în care utilizarea dispozitivelor pneumatice...

9.2.2 Tipuri de marci tensometrice si caracteristicile acestora Principalele caracteristici ale MT sunt determinate de natura materialului din...

c) Transformatoare de curent. În practica aceste transformatoare se mai nu-mesc “reductoare de curent”si sunt folosite pentru prelucrarea...

Notiuni fundamentale: Deplasarea este o marime ce caracterizeaza schimbarile de pozitie ale unui corp sau ale unui punct caracteristic fata de un...
Te-ar putea interesa și

INTRODUCERE Competitivitatea în construcţia de maşini, ca şi în alte sectoare economice de altfel, este puternic influenţată de capacitatea unui...

CAPITOLUL 1 ECHIPAMENTUL DE REGLARE A PRESIUNII Elementele echipamentului de reglare a presiunii poartă denumirea de supape, valve sau ventile....

Capitolul 1. Introducere în proiectarea industrială 1.1 Definirea proiectării inginereşti. În studiul ştiinţific se caută dezvoltarea unor...

CAPITOLUL 1 INTRODUCERE 1.1. GENERALITATI Robotica reprezintă un domeniu de ştiinţă multidisciplinar, care cuprinde elemente de Fizică,...

PROIECT DE AN tabelul 1. TEMA DE PROIECT: Se da utilajul de transport si manipulare reprezentat schematic în fig. 1. El este destinat...

I. Generalitati Ingineria mecatronica este o noua directie de studiu, o combinare a preciziei in ingineria mecanica si a sistemelor de calcul....

TEMA DE PROIECT Să se proiecteze un robot industrial cu arhitectură generală de tip SCARA, cu următoarele caracteristici tehnice generale:...

1: Elaborarea specificaţiilor de proiectare 1.1 Identificarea completă a produsului (a) Titlul proiectului: Elaboraţi o specificaţie de...