
Extras din curs
Pentru examen promovat în sesiunea programatã se acordã suplimentar 1 punct
la nota de examen Nexamen.
Modul în care va fi evaluatã activitatea din timpul semestrului (Nsemestru):
Nsemestru=0.5 x Ntest teoretic + 0.5 x Nlaborator + 1,00 (pentru prezenta la curs
90%)
Test(e) semestru
Var. 1: în numãr de douã (din maxim 3 prelegeri fiecare) se sustin în scris în
timpul semestrului în saptãmânile 4 si 8 sau,
Var. 2: un singur test (din maxim 5 prelegeri) sustinut în scris în timpul
semestrului în saptãmâna 7
2
1.1. DEFINItII, DOMENII DE UTILIZARE, EVOLUtIE
Robotul este un sistem automatizat de înalt nivel al cãrui principal rol este manipularea pieselor si uneltelor,
înlocuind actiunea umanã.
Principalele aplicatii în care utilizarea robotilor industriali are avantaje evidente sunt:
. încãrcarea si descãrcarea masinilor unelte cu comandã numericã (14 %);
. sudurã prin puncte sau pe contur (32 %);
. operatii de ansamblare (20 %);
. vopsire (10 %);
. turnarea în forme a pieselor mari (10 %);
. controlul calitãtii (12 %);
. manipularea substantelor toxice, radioactive (2 %);
Robotul industrial este definit în prezent ca un manipulator tridimensional, multifunctional, reprogramabil,
capabil sã deplaseze materiale, piese, unelte sau aparate speciale dupã traiectorii programate, în scopul efectuãrii
unor operatii diversificate de fabricatie.
Importanta acordatã roboticii, domeniile de activitate semnificative sunt prezentate în figura 1.1.:
0
100000
200000
300000
400000
500000
600000
700000
SUA
Japonia
Germania
Italia
Franta
Anglia
Spania
Suedia
Austria
Rusia
Elvetia
Rep. Ceha
Polonia
Ungaria
SUA Japonia Germania Italia Franta Anglia Spania Suedia Austria Rusia Elvetia Rep. Ceha Polonia Ungaria
2000 89900 389000 91200 39200 21700 12300 13200 6300 3000 5000 3800 1300 500 100 676500
2010 134850 622400 155040 66640 36890 20910 22440 10710 5100 8000 6080 2080 800 160 1092100
Fig. 1.1. a. Repartitia robotilor industriali pe domenii de activitate; b. Evolutia parcului de roboti industriali în
principalele tãri dezvoltate
14%
8%
17%
39%
20%
2%
Turnatorie
Vopsire
Deservire MU
Sudura
Intretinere
Alte domenii
19%
4%
8%
25%
21%
23%
Ansamblare
Vopsire
Deservire MU
Sudura
Intretinere
Alte domenii
a.
b.
SUA Japonia
3
. Robotii mobili (independenti) utilizati din ce în ce mai mult în diverse aplicatii pentru a îndeplini
sarcini complexe în spatii sau medii în care accesul omului este dificil sau imposibil: mediu marin la
adâncimi foarte mari, inspectia anumitor instalatii din industria chimicã sau nuclearã.
. Nanoroboti, medicinã pentru microoperatii.
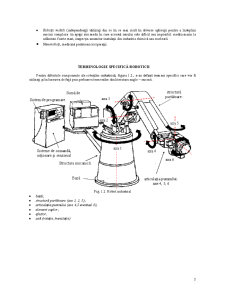
TERMINOLOGIE SPECIFICÃ ROBOTICII
Pentru diferitele componente ale robotilor industriali, figura 1.2., s-au definit termeni specifici care vor fi
utilizati si în lucrarea de fatã prin preluarea termenilor din literatura anglo – saxonã.
Fig. 1.2. Robot industrial
. bazã;
. structurã purtãtoare (axe 1, 2, 3);
. articulatia pumnului (axe 4,5 eventual 6);
. element cuplor;
. efector;
. axã (rotatie, translatie).
Sursã de
Sistem de programare energie
Sisteme de comandã,
actionare si senzorial
axa 5
axa 1
Bazã
axa 6
axa 3
axa 2
axa 4
Structura mecanicã
structurã
purtãtoare:
axe 1, 2, 3
articulatia pumnului:
axe 4, 5, 6
4
Arhitectura de bazã a robotilor industriali actuali este prezentatã în figura 1.3.:
Fig. 1.3. Arhitectura robotilor industriali
. mediu de lucru;
. sarcinã;
. structura mecanicã;
. sistem de actionare;
. sistem de comandã;
. sistem de prelucrare senzorial;
. sistem de programare;
. sursa de energie;
. I / O modulul de intrãri – iesiri;
. magistrala industrialã.
1.3.1. Clasificarea manipulatoarelor si robotilor pe generatii
Clasificarea pe generatii foloseste drept criteriu de bazã capacitatea masinii de percepere si interpretare a
semnalelor din mediul exterior, precum si de adaptare la mediu în timpul procesului de lucru.
. Manipulatoarele manuale (prima generatie);
. Manipulatoare automate (generatia a doua);
. Manipulatoare inteligente (generatia a treia);
. Robotii industriali din prima generatie sunt manipulatoare automate programabile, având cel putin 3 axe
(dintre care cel putin 2 axe sunt programabile prin învãtare sau printr-un limbaj simbolic).
. Robotii industriali din generatia a doua;
. Robotii industriali din generatia a treia sunt dotati cu senzori inteligenti (prelucrare localã a informatiei) si
utilizeazã elemente de inteligentã artificialã;
. Robotii inteligenti sunt dotati cu programe de inteligentã artificialã avansate, au capacitate de autoinstruire.
Majoritatea robotilor industriali folositi în prezent sunt din generatia 1 si 2.
Preview document


















































































Conținut arhivă zip
- Sisteme Flexibile de Productie.pdf
Alții au mai descărcat și

CURSUL NR. 1 INTRODUCERE Estetica este ştiinţa care se ocupă cu senzaţiile frumosului din natură şi din artă, şi cu sentimentele pe care aceste...

CAPITOLUL 1 NOŢIUNI GENERALE PRIVIND TRANSMISIILE MECANICE Transmisiile mecanice sunt organe de maşini complexe, realizate din mai multe elemente...

1. INTRODUCERE 1.1. OBIECTUL SI IMPORTANTA DISCIPLINEI ORGANE DE MASINI Disciplina Organe de masini – disciplina de cultura tehnica generala –...

CONCEPTUL DE FLEXIBILITATE Elementul de noutate în concepţia actuală despre automatizarea proceselor tehnologice îl constituie flexibilitatea sau...

1.1.NOŢIUNI FUNDAMENTALE 1.1.1.Produsele tehnice în viziune sistemică Sarcinile tehnice sunt îndeplinite cu ajutorul produselor tehnice, care...

3.2. Asamblari tip arbore butuc (prin forma si prin forta de frecare) 3.2.1. Asamblari demontabile prin forma Asamblarile prin forma pot fi: a)...

1. Notiuni teoretice Reductoarele de turatie cu roti dintate sunt mecanisme organizate cu ansambluri independente, formate din roti dintate,...

Te-ar putea interesa și

CAPITOLUL 1: Studiu bibliografic 1.1 Introducere Dezvoltarea impetuoasă a ştiinţei şi tehnicii determină tendinţe noi în prelucrarea metalelor...

1. DEFINIREA ŞI ROLUL CONCEPTULUI DE LOGISTICĂ ÎN MANAGEMENTUL ÎNTREPRINDERILOR INDUSTRIALE 1.1. Conceptul de logistică. Definire şi evoluţie...

1. Generalitati. În practica industriala de pâna acum, automatizarea se realiza mai ales în cadrul unor sisteme rigide de tipul liniilor de...

Conceptul de schimbare Schimbare organizatorică sau managementul schimbarii Schimbarea este un imperativ al lumii sociale şi economice iar în...

1 Descriere generala Un sistem flexibil de fabricaţie este un sistem de producţie automatizat, care poate fabrica, cu un minim de intervenţie...

Conceptul de schimbare. Schimbare organizatorică sau managementul schimbarii. Societatea contemporană a intrat intr-o fază de schimbare...

Cum ajuta robotizarea producatorii de componente auto din Romania 23 Metode si tehnologii de mare eficienta economica folosite în managementul...

1. Introducere Conform [DEX 98], termenul de fabricaţie este definit în modul următor: FABRICAŢIE, fabricaţii, s. f. Proces tehnologic de...