Cuprins
- Capitolul 1.
- Introducere în problematica roboţilor.
- 1.1. Structurile generale şi gradele de libertate ale robotului.
- 1.2. Tipuri de structure ale roboţilor.
- 1.3. Concepţia modulară a roboţilor.
- Capitolul 2.
- Studiul stadiului actual privind roboţii mobili.
- 2.1. Clasificarea roboţilor mobili.
- 2.2. Structura roboţilor mobili.
- 2.3. Elemente mecanice ale roboţilor mobili.
- 2.4. Sisteme de acţionare utilizate la construcţia roboţilor mobili.
- 2.5. Sistemul sensorial al roboţilor mobili.
- 2.6. Programarea roboţilor.
- Capitolul 3.
- Platforma mobilă a unui minirobot.
- 3.1. Prezentarea constructivă a platformei mobile.
- 3.2. Schema cinematic a platformei mobile.
- Capitolul 4.
- Calculul organologic al robotului mobil cu şenile.
- 4.1. Rostogolirea roţii pe un plan orizontal.
- 4.1.1. Cazul rostogolirii fără alunecare.
- 4.1.2. Rostogolirea cu alunecare.
- 4.2.Elemente de calcul cinematic ale roboţilor mobili.
- 4.3. Elemente de calcul ale platformei mobile.
- 4.3.1. Calculul reductorului cu roţi dinţate.
- 4.3.2. Determinarea forţei axiale.
- 4.3.3. Determinarea vitezei de deplasare a platformei mobile.
- Capitolul 5.
- Sistemul de control al platformei mobile.
- 5.1.Interfaţa de recepţie în infraroşu.
- 5.2. Interfaţa de emisie pe infraroşu.
- 5.3. Interfaţa senzorului optic IR pentru detecţia liniei.
- 5.4. Principiul de funcţionare al senzorului pentru detecţia obiectelor.
- 5.5. Descrierea microcontroler-ului PIC18F14K50.
- 5.6. Servomecanismele de acţionare.
- Capitolul 6.
- Controlul mişcării robotului cu şenile.
- 6.1. Deplasare înainte.
- 6.2. Deplasare înapoi.
- 6.3. Întoarcere.
- 6.4. Întoarcere faţă.
- 6.5. Întoarcere prin acţionarea sincronă a celor două servomotoare în sens contrar.
- Capitolul 7.
- Aplicaţia software al robotului mobil cu şenile.
- Capitolul 8.
- Concluzii.
- Bibliografie.
Extras din licență
Memoriu de prezentare
Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de muncile grele şi de rutină.
Această activitate, de a lungul secolelor a încercat să absolve omul de „calitatea” de rob ducând la realizarea unui automat – robotul. Potenţial, robotul poate elibera omul de funcţiile rolului şi nu numai de acestea. Apariţia roboţilor, evoluţia lor, a fost posibilă graţie simbiozei dintre mecanică, electronică şi informatică. De aceea roboţii în general, şi cei industriali în special, sunt produse prin excelenţă mecatronice, adică produse care înglobează elemente mecanice, electronice şi informatice.
Roboţii industriali sunt produse noi, care implică în fabricarea lor, tehnologii de vârf.
Introducerea acestora în procesele de producţie industrială a răspuns unei necesităţi sociale: trecerea de la fabricarea produselor în „serii mari” cu ajutorul maşinilor automate specializate, la fabricaţia în serii medii şi mici, situaţie în care operaţiile de manipulare a pieselor şi a dispozitivelor specializate au devenit de mare importanţă.
Dezvoltarea, cu o dinamică fără precedent şi la cote corespunzătoare celor mai înalte realizări ale ştiinţei şi tehnicii contemporane, a roboţilor industriali a pus probleme de ample dimensiuni proiectării acestora.
În acest sens creşterea performanţelor roboţilor industriali se poate realiza printr-un studiu dinamic bazat pe cele mai noi metode de analiză şi calcul, justificând astfel preocupările orientate către o funcţionare cât mai fiabilă şi eficientă.
Robotul reprezintă, după părerea mai multor oameni, o maşinărie programabilă care este capabilă să imite aspectul unei fiinţe inteligente, de obicei oamenii. Astfel spus, roboţii au un rol foarte important în viaţa de zi cu zi. Fie că este vorba despre un autovehicul, un avion sau pur şi simplu obiectele de uz casnic pe care le folosim în fiecare zi, fiecare dintre acestea au fost construite sau concepute cu ajutorul unui robot.
Roboţii pot fi împărţiţi după natura şi întrebuinţările lor în 2 mari categorii: roboţi mobili şi roboţi tip manipulator.
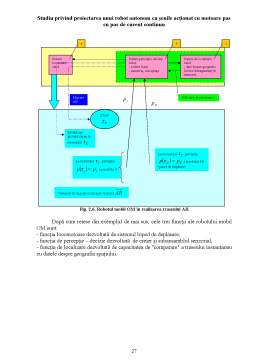
Roboţii mobili, care fac obiectul lucrării de faţă, nu au un element fix, sunt folosiţi pentru funcţii de transport, explorare, supraveghere. Însuşi prin denumire, un robot mobil, se diferenţiază de robotul de tip manipulator, prin mobilitate. Robotul mobil este o maşină având capacităţi de percepţie, de decizie şi de acţiune, ce-i permit să acţioneze într-o manieră autonomă în mediul în care acesta se deplasează, în funcţie de informaţiile primite de la senzori. Unii dintre roboţi nu sunt complet automaţi, dar sunt controlaţi de oameni prin telecomandă, utilizând camere video sau alte sisteme de control. Majoritatea roboţilor sunt utilizaţi în procesele de fabricaţie. Alţii pot fi utilizaţi ca manipulatoare pe adâncul mării, telecomandate. O altă categorie de roboţi pot fi utilizaţi în diverse laboratoare unde se lucrează cu substanţe radioactive sau există temperaturi ridicate sau alte locuri periculoase. Unii roboţi sunt mobili, având sistem de locomoţie încorporat, putându-se deplasa pe uscat, pe apă, în aer.
Roboţii manipulatori sunt cea mai răspândită categorie de roboţi. Locul lor este bine cunoscut în toate domeniile exploatate de om.
Lucrarea de faţă, are ca scop realizarea unui robot autonom cu şenile acţionate cu motoare pas cu pas de curent continuu care să-şi poată schimba direcţia la întâlnirea obstacolelor cu ajutorul unor senzori sau camere video.
În continuare am prezentat principalele etape prin care se poate realiza un astfel de robot autonom cu şenile acţionate cu motoare pas cu pas de curent continuu.
Capitolul 1.
Introducere în problematica roboţilor
Revoluţia informatică a marcat saltul de la societatea industrializată la societatea avansat informatizată (societatea informaţională), generând un val de înnoiri în tehnologie şi educaţie.
Japonezii au meritul de a fl definit sensul acestor mişcări de înnoire, brevetând în anul 1972 termenul de mecatronică. Termenul a fost utilizat pentru a defini fuziunea tehnologică: mecanică - electronică - informatică.
Electronica, alături de informatică, este unul dintre domeniile cele mai dinamice din robotică. Dezvoltarea electronicii s-a făcut cu paşi rapizi, începând din dublat numărul de componente pe o placă de siciliu, ajungând azi la zeci de milioane de tranzistori. În contextul acestei dezvoltări spectaculoase se înscrie şi domeniul microcontrolerelor (calculatorul într-un singur chip).
Utilizarea microcontrolerelor în aplicaţii, la fel ca şi utilizarea microcontrolerelor şi a calculatoarelor de proces, permit înlocuirea componentelor hardware (electrice şi mecanice) cu componente software.
Robotica este definită simplu "ştiinţa maşinilor inteligente". Etimologia acordă fiinţei inteligente facultatea de asociaţie. A fi inteligent într-un prim sens este deci, a putea repeta sau crea în mod liber, legături între obiecte. Aceasta reprezintă o viziune mai mult sintetică a inteligenţei. Astfel vorbind despre inteligenţă pentru fiinţele non-umane sau pentru maşini, în mod explicit sau nu, se face prin referinţă la om. Turing a înţeles foarte bine aceasta, când a elaborat textul: "o maşină este inteligentă dacă comportamentul său seamănă cu al omului care o poate înlocui".
Inteligenţa maşinilor a fost prevăzută de multă vreme în literatură şi cu mult înaintea apariţiei calculatoarelor, a trezit interesul oamenilor de stiinţă. Astfel prima denumire a fost de "creier electronic" şi cea de "neuroni", pentru a desemna circuitele.
Prin maşină se înţelege un obiect manufacturat care interacţionează cu mediul său. Prin această interacţiune fie că ia din mediu energia necesară şi o converteşte în energie mecanică şi căldură disipată, fie manipulează informaţii. Din punct de vedere chronologic, ar exista maşini simple, conduse de către un operator uman, maşini programate să se comporte într-un anumit fel, mai avansate decât primele şi în fine, maşini cu proprietăţi senzoriale, cu capacitatede planificare, recunoaştere a formelor, navigare, învăţare (cu disponibilităţi de prelucrare avansată a informaţiilor), numite maşini inteligente.Maşinile inteligente pot opera individual sau conectate în cadrul unor sisteme.In acest ultim caz performanţele globale ale acestor sisteme sunt mai bune decât suma performanţelor maşinilor componente. De asemenea, maşinile inteligente operează autonom, fără un control total al operatorului uman dar cu posibilitatea de a colabora cu acesta, operează în medii nestructurate, ce pot fi periculoase sau lipsite de confort.
Dintre tipurile de structuri, pentru maşinile inteligente, cea mai adecvată arhitectură este cea de tip reţea, prezentată în fig. 1.
Fig. 1.1. Arhitectura unei maşini inteligente
Subsistemul de percepţie, care au rolul de a colecta, stoca, procesa şi distribui informaţii despre starea actuală a maşinii şi a mediului în care operează.
Subsistemul de cunoaştere, cu rolul de a evalua informaţiile colectate de sistemul de percepţie şi de a planifica acţiunile maşinii.
Subsistemul de execuţie, responsabil cu desfăşurarea tuturor acţiunilor maşinii, pe baza instrucţiunilor de la celelalte două subsisteme.
Subsistemul de autoîntreţinere are rolul de a menţine maşina în condiţii bune de funcţionare. Acest subsistem asigură o monitorizare intermitentă a comportării maşinii pentru a preveni eventualele defecte (autoîntreţinere preventivă) sau pentru a sesiza imediat ce apar (autodiagnostic). În cazuri particulare, autoîntreţinerea poate însemna chiar şi autoreparare.
Subsistemul de conversie a energiei asigură cantitatea şi forma de energie necesară pentru ca toate celelalte subsisteme să aibă o bună funcţionare.
Componentele fizice din structura acestor subsisteme sunt: senzorii şi traductorii, actuatorii, microprocesoarele, reţelele de comunicaţii, dispozitivele de intrare/ieşire, efectorii finali, sursele de eregie.
Datorită dezvoltărilor din mecanică, automatică, electronică, informatică şi inteligenţă artificială, noţiuni precum roboţi evoluaţi, roboţi inteligenţi, roboţi adaptivi, celule de automatizare flexibilă, ateliere de producţie fără muncitori sunt din ce în ce mai folosite. Multe din aceste noţiuni nu sunt înţelese clar în afara cercurilor de specialişti, datorită şi faptului că aceştia din urmă dau interpretări şi definiţii uneori divergente, care accentuează importanţa anumitor domenii ştiinţifice (mecanică, electronică, automatică, informatică etc); publicul larg are imaginea despre roboţi creată de literature ştinţifico-fantastică:
Preview document




























































































Conținut arhivă zip
- Cuprins.docx
- Introducere.docx
- Studiu Privind Proiectarea unui Robot Autonom cu Senile Actionat cu Motoare Pas cu Pas de Curent Continuu.docx
Alții au mai descărcat și

Memoriu justificativ Tema lucrării de diplomă este “Proiectarea şi verificarea unui şasiu spatial sudat utilizând pachete software dedicate”. Ea...

CAPITOLUL I Introducere 1.1.Generalitati 1.1.1. Scurt istoric, definiţii Unul din cele mai importante aspecte în evoluţia fiinţei umane este...

TEMA DE PROIECTARE Sa se proiecteze o mâna mecanica cu mecanism biela manivela si actionare hidraulica cu motor liniar cu urmatoarele date: a)...

Argument Pentru îmbunătăţirea propriei activităţi pe care am depus-o în şcoală şi pentru a atinge standardele curriculare prevăzute pentru...

1. GRUPUL PISTON - BIELĂ A. PISTONUL Construcţia pistonului. Este o piesa uşoară, turnată, ce execută o mişcare de du-te-vino în lungul...

=> Definiții => Masuri de performanță => Tehnologii de acționare de bază --piezoelectric --electrostatic --aliaje cu memoria formei...

Ec. Diferentiala matriceala coresp. Acestui sistem mechanic, unde sistemul auxiliary este format din masa m2 si din elemental elastic K2 care se...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...
Te-ar putea interesa și

1.Generalitati. Incercarile de obtinere a unor noi materiale superperformante au condus la dezvoltarea unei clase de produsi cunoscuti sub...

Rezumat Lucrarea de licenţa cu titlul ,,Proiectarea si realizarea unui vehicul autonom cu tracţiune diferenţiala realizată cu motoare pas cu pas’’...

CAPITOLUL I NOTIUNI GENERALE ALE MOTORULUI PAS CU PAS 1.1. Principiul constructiv si de functionare Motorul pas cu pas are o utilizare larga,...

Motoarele sincrone pas cu pas sunt destinate transformării impulsurilor de curent, în deplasări unghiulare sau liniare discrete, numite paşi....

Abstract Pentru asamblarea microsisteme hibride ,o precizie ridicată de ordinul catorva micrometri este necesară.Combinaţia unui robot paralel cu...

Subsistemele logistice ale unor sisteme de fabricatie moderne utilizeaza, pentru manipularea si transportul materialelor, pieselor,...

