
Extras din proiect
CARACTERISTICILE ROBOTILOR PUMA 600
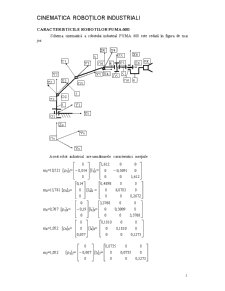
Schema cinematica a robotului industrial PUMA 600 este redata în figura de mai jos:
Acest robot industrial are urmatoarele caracteristici inertiale :
m1=10,521 [r1]1= [I1]1=
m2=15,781 [r2]2= [I2]2 =
m3=8,767 [r3]3= [I3]3=
m4=1,052 [r4]4= [I4]4=
m5=1,052 [r5]5= [I5]5=
m6= 0,351 [r6]6= [I6]6 =
Unitatile de masurã pentru mi, ri, Ii, sunt respectiv : (Ns2/m) , (m) , (N s2 m).
Parametrii H-D ai acestui robot industrial sunt redati mai jos :
articulatia ai ai bi qi initial
[grd] [m] [m] [grd]
1 0 0 0 0
2 -90 0 -0.149 0
3 0 0.432 0 0
4 90 0.02 -0.432 0
5 -90 0 0 0
6 90 0 -0056
Traiectoriile celor 6 articulatii sunt descrise de urmatoarele curbe :
1 2p 2p
qi = ¾ [ ¾¾ t - sin ( ¾¾ t)] pentru i=1,2,...,6
2 10 10
In urma rularii programului de simulare al comportamentului dinamic al robotilor industriali am obtinut urmatoarele grafice de variatie ale momentelor motrice în raport cu timpul :
Fig.1.Graficul de variatie al momentului motric al elementului 6 fata de timp.
Fig.2. Graficul de variatie al momentului motric al elementului 5 fata de timp.
Fig.3.Graficul de variatie al momentului motric al elementului 4 fata de timp.
Fig.4.Graficul de variatie al momentului motric al elementului 3 fata de timp.
Fig.5.Graficul de variatie al momentului motric al elementului 2 fata de timp.
Fig.6 Graficul de variatie al momentului motric al elementului 1 fata de timp.
1. Coordonatele articulare pentru douã puncte apartinând spatiului de lucru al robotului definite în coordonatele lor externe ( operationale ).
PROBLEMA CINEMATICA DIRECTA
Problema cinematica directa reprezinta ansamblul relatiilor care permit definirea pozitiei endefectorului în functie de coordonatele articulare, practic ea asigurând conversia coordonatelor interne (articulare) în coordonate externe (operationale). Pozitia endefectorului este definitã prin cele „m” coordonate :
X = [ x1 , x2 , , xm ] (1)
Variabilele articulare sunt definite astfel :
q = [ q1 , q2 , , qn ]T (2)
Problema cinematica directa se exprima prin relatia :
X = f(q) (3)
Problema cinematica inversa prin relatia :
q = f-1(X)
Existã mai multe modalitati de definire a vectorului „X” , combinând una din metodele de definire a pozitiei cu una dintre metodele de definire a orientarii.
De exemplu utilizând cosinusii directori, obtinem:
X = [Px , Py , Pz , sx ,sy , sz , nx , ny , nz , ax , ay , az]T (4)
În cele mai multe cazuri , calculul lui „X” implica calculul matricei de transformare a endefectorului.
Utilizând triedrele si notatiile „Hartemberg-Denavit” , matricea de transformare a coordonatelor triedrului „i” în coordonate „i-1”, se defineste ca fiind i-1Ti
i-1Ti = (5)
Conversia coordonatelor articulare în coordonate operationale se face prin rezolvarea problemei cinematice directe iar conversia coordonatelor coordonatelor operationale în coordonate articulare se face prin rezolvarea problemei cinematice inverse.
PROBLEMA CINEMATICA INVERSA
Problema cinematica inversa permite calculul coordonatelor articulatiilor, care aduc endefectorul în pozitia si orientarea dorita, date fiind coordonatele absolute (operationale).
Atunci când problema cinematica inversa are solutie, ea se constituie în modelul geometric invers „MGI”.
Daca nu putem gasi o solutie analitica problemei cinematice inverse (ceea ce se întîmpla destul de frecvent) putem apela la metode numerice, al caror neajuns însa îl constituie volumul mare de calcule. Cea mai frecventa metoda este metoda Newton-Raphson.
Exista o varietate de metode de rezolvare a problemei cinematice inverse ( Pieper 68 , Paul 81 , Lee 83 , Elgazaar 85 , Pieper si Khalil 88 ).
Dintre acestea se remarca pentru facilitatile pe care le ofera metoda Pieper si Khalil si metoda lui Paul.
Metoda lui Khalil si Pieper permite rezolvarea problemei cinematice inverse indiferent de valorile caracteristicilor geometrice al robotului, dar pentru robotii cu sase grade de libertate si care poseda sau trei cuple cinemtice de rotatie cu axele concurente sau trei cuple cinematice de translatie.
Preview document





























Conținut arhivă zip
- Cinematica Robotilor Industriali - Caracteristicile Robotilor Puma 600.doc
Alții au mai descărcat și

1.Generalitati. Incercarile de obtinere a unor noi materiale superperformante au condus la dezvoltarea unei clase de produsi cunoscuti sub...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...

Te-ar putea interesa și

1. NOTIUNI GENERALE PRIVIND ROBOTII INDUSTRIALI 1.1. Definitii si notiuni uzuale utilizate Cuvântul `robot` a fost folosit pentru prima datã în...