Extras din proiect
In cele ce urmeaza, vom studia modul in care poate fi implementat un compensator fuzzy pe un DSP fabricat de Texas Instruments si anume TMS320C14. Sistemul este alcatuit dintr-un motor real, controlat de catre DSP-ul programabil. Cu ajutorul acestuia putem face modificari de cod, precum si controlul interactiv al sistemului. In locul algoritmului initial PID, se va introduce un algoritm fuzzy; in final vom compara raspunsul motorului, precum si performantele algoritmului in ambele cazuri. Acasta implementare dovedeste fezabilitatea si robustetea unui sistem real de conducere fuzzy, aplicat unui sistem real.
Introducere
Logica fuzzy este o teorie relativ noua. Acest DSP poate fi folosit atat in intelegerea logicii fuzzy, cat si in implementarea ei pe un sistem real.
Controlul unui servomotor reprezinta o aplicatie viabila si in acelasi timp deosebit de folositoare. Un control programabil pentru servomotor foloseste un algoritm PID de reglare, implementat pe un motor real, cu ajutorul unui DSP TMS320C14. Exista si alte componente mai noi si mai rapide, dar ‘C14 este optimizat pentru controlul motoarelor, avand capacitati de modulare puls (PWM). Deasemenea, are un cip debugger code si un cod pentru controlul interactiv PID. Codul compensatorului PID (scris in limbaj de asamblare – TMS320) foloseste pozitia si viteza motorului pentru intrari si ca iesire, curentul de intrare al motorului. Codul de control ii permite operatorului sa schimbe interactiv valorile (pozitie si viteza) si sa urmareasca erorile. Modificarea codului pentru introducerea logicii fuzzy in locul reglarii PID, necesita inlocuirea codului pentru compensatorul PID cu cod pentru un compensator fuzzy.
Functia de apartenenta pentru compensator defineste eroarea intre pozitia curenta a motorului si cea dorita. Cinci variabile lingvistice caracterizeaza functia: negative medium, negative small, zero, positive small, positive medium. Functia este reprezentata prin triunghiuri isoscele, pentru usurinta in fuzificare.
Sistemul servomotor (Power-14)
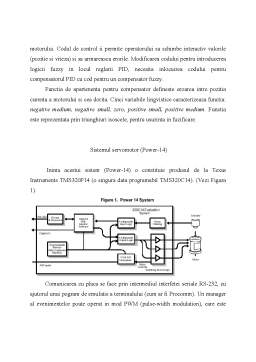
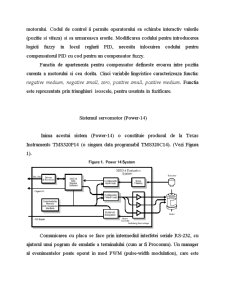
Inima acestui sistem (Power-14) o constituie produsul de la Texas Instruments TMS320P14 (o singura data programabil TMS320C14). (Vezi Figura 1).
Comunicarea cu placa se face prin intermediul interfetei seriale RS-232, cu ajutorul unui pogram de emulatie a terminalului (cum ar fi Procomm).
Preview document











Conținut arhivă zip
- Implementarea Logicii Fuzzy pentru Controlul unui Servomotor cu Ajutorul unui Dsp Programabil (Tms320c14).doc
Alții au mai descărcat și

1. Ball and beam Sistemul „ball and beam” este unul dintre cele mai populare modele pentru lucrul in laborator in domeniul controlului de...

ARGUMENT Prin automatizarea unor procese se urmăreşte eliminarea intervenţiei directe a omului în acestea, asigurându-se desfăşurarea lor în...

Sa se proiecteze un regulator numeric astfel incat sistemul in bucla inchisa sa satisfaca urmatoarele performante: -eroare stationara nula;...

Conceptele de bază ale logicii fuzzy Logica clasică sau booleană este construită pe două valori de adevăr: “adevărat” sau “fals" (TRUE sau FALSE,...

CAPITOLUL I INTRODUCERE Proiectul reprezintă realizarea unui Controller PID cu ajutorul tehnici Fuzzy, cu ajutorul acestui regulator sper sa pot...

1. INTRODUCERE Teoria sistemelor fuzzy introdusa în 1965 de catre Lofti Zadeh la Universitatea Berkeley din California, studiaza sisteme cu mai...

1. Descrierea funcţională a automatului Vom lucra în logică pozitivă şi vom presupune că pe bandă există o singură ţeavă la un moment dat. Se va...

Regulatoare fuzzy adaptive Proiect sisteme inteligente Cuprins Generalitati Tipuri de regulatoare adaptive fuzzy Regulatoare fuzzy cu...