
Extras din proiect
Robotul 1 preia piesele de masa rotativa si le depune in bufferul corespunzator de la i1, i2, i3. Piese;e sunt luate numai din pozitia PA1 rotind masa rotativa. Dupa ce piesa a fost luata de pe masa, aceasta revine in pozitia initiala. Piesele sunt depuse in buufer doar daca compartimentul corespunzator este liber. Daca robotul primeste un semnal pe cele 2 intrari (i1,i2) sa depuna pe banda transportoare un anumit tip de piesa atunci acesta preia piesa respectiva de pe masa rotativa si o depune pe banda transportoare doar in cazul in care era liber. Daca nu, verifica daca piesa specificata pe intrare este de acelasi tip cu cea pe care a luat-o. Daca da o depune pe banda transportoare, daca nu depune piesa in compartimentul respectiv din buffer si preia o piesa de tipul specificat oe intare fie din buffer, fie de pe masa rotativa. Toate piesele sunt depuse pe banda transportoare in pozitia P1. Imediat dupa depunerea unei piese in pozitia P1 robotul activeaza o iesire.
Robotul 2 In momentul cand exista o piesa in pozitia P1 porneste banda transportoare si asteapta ca piesa sa ajunga in pozitia P2, indicata de senzorul s2. Cand piesa a ajuns in aceasta pozitie, robotul opreste banda, preia piesa, o duce in pozitia P (post de prelucare), activeaza o iesire si o depune pe banda transportoare in pozitia P2 si porneste banda. Cand piesa ajunge in pozitia P3 robotul doi opreste banda.
Robotul 3 Cand exista piesa in pozitia P3, o camera de luat vederi face o inspectie de calitate a piesei care dureaza 2 secunde, dupa care robotul preia piesa si o depune in una din urmatoarele pozitii: rebut, daca piesa nu a fost prelucrata corect, sau in una din cele 3 stive verticale numai daca in stiva este loc, stiva avand 8 pozitii. Daca stiva este plina robotul activeaza una din cele 3 iesiri dedicate STV1, STV2, STV3 si asteapta semnal de golire a stivei din exterior.
Legaturile intre roboti sunt date de urmatoarele iesiri:
O[3] – ce da semnal daca robotul 1 a pus piesa pe banda rulanta
O[5] – ce da semnal daca robotul 2 a pus piesa pe banda rulanta
Robotul R1
Intrarea I[1] Intrarea I[2] Semnificatie
0 0 Stare libera
0 1 Piesa de tip 1
1 0 Piesa de tip 2
1 1 Piesa de tip 3
Iesirea O[1] Iesirea O[2] Semnificatie
0 0 Masa rotativa in pozitia 1
0 1 Masa rotativa in pozitia 2
1 0 Masa rotativa in pozitia 3
Iesirea O[3]: Semnal trimis la punerea unei piese pe banda rulanta
Pozitii:
à P0: parcare generala
à P1: ia/pune piesa de pe masa rotativa (jos);
à P2: ia/pune piesa de pe masa rotativa (sus);
à P3: pune piesa pe banda rulanta(jos)
à P4: pune piesa pe banda rulanta(sus);
à P5: pune /ia piesa in buffer1(jos);
à P6: pune /ia piesa in buffer1(sus);
à P7: pune /ia piesa in buffer2(jos);
à P8: pune /ia piesa in buffer2(sus);
à P9: pune /ia piesa in buffer3(jos);
à P10:pune /ia piesa in buffer3(sus);
Senzorii:
à B1=buffer1(0/gol, 1/plin);
à B2=buffer2(0/gol, 1/plin);
à B3=buffer3(0/gol, 1/plin);
Programul in pseudocod:
1.Verifica intrarile
2. Daca nu se cere nimic
1. Daca buffer1 este gol
a. Ia piesa de tip 1 de pe masa rotativa
b. Verificam intrarile
c. Daca am primit cerere pentu piesa de tip 1
i. Punem piesa pe banda rulanta
d. Daca avem piesa de tip 2 sau 3 punem piesa de tip 1 in buffer si apoi luam piesa de tip 2 sau 3 si o punem pe banda rulanta
e. Punem piesa de tip 1 in buffer
f. GOTO 1) Verifica intrarile
2. Daca buffer2 este gol
a. Muta masa rotativa in pozitia 2
b. Ia piesa de tip 2 de pe masa rotativa
c. Muta masa rotativa in pozitia 1
d. Verificam intrarile
e. Daca am primit cerere pentu piesa de tip 2
i. Punem piesa pe banda rulanta
f. Daca avem piesa de tip 1 sau 3 punem piesa de tip 2 in buffer si apoi luam piesa de tip 1 sau 3 si o punem pe banda rulanta
g. Punem piesa de tip 2 in buffer
h. GOTO 1) Verifica intrarile
3. Daca buffer3 este gol
a. Muta masa rotativa in pozitia 3
b. Ia piesa de tip 3 de pe masa rotativa
c. Muta masa rotativa in pozitia 1
d. Verificam intrarile
e. Daca am primit cerere pentu piesa de tip 3
i. Punem piesa pe banda rulanta
f. Daca avem piesa de tip 1 sau 2 punem piesa de tip 3 in buffer si apoi luam piesa de tip 1 sau 2 si o punem pe banda rulanta
g. Punem piesa de tip 3 in buffer
h. GOTO 1) Verifica intrarile
3. Daca se cere piesa de tip 1
1. Daca este piesa de tip 1 in buffer
a. Luam piesa de tip 1 din buffer
b. Verificam intrarile
Preview document















Conținut arhivă zip
- Proiect SCR.doc
Alții au mai descărcat și

1. Generalitati. În practica industriala de pâna acum, automatizarea se realiza mai ales în cadrul unor sisteme rigide de tipul liniilor de...

Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte insemnata din efortul...

Se considera un robot destinat unei linii de acoperire galvanica. Procesul tehnologic intr-o astfel de linie cuprinde 6 posturi, 5 pentru...

Definirea sistemului flexibil de prelucrare Sistemul flexibil de prelucrare SFP poate fi definit ca un ansamblu integrat de maşini-unelte...

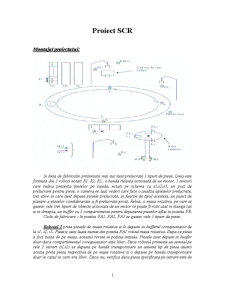
Enunt: Se considera montajul de mai jos: In linia de fabricatie prezentata mai sus sunt prelucrate trei tipuri de piese. Linia este formata din...

Regulatoare fuzzy adaptive Proiect sisteme inteligente Cuprins Generalitati Tipuri de regulatoare adaptive fuzzy Regulatoare fuzzy cu...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

Manipulatorul este sistemul mecanic automat a carui comanda se bazeaza pe sisteme rigide care presupun o interventie in structura fizica a...
Te-ar putea interesa și

Tema de proiectare In timpul procesarii combustibililor ( metan, pacura) in arzatoare speciale pentru producerea aburului rezulta oxizi de carbon...

Memoriu tehnic În timpul procesării combustibililor in arzătoare speciale pentru producerea aburului rezultă oxizi de carbon, sulf şi azot. Se...

Prezentul raport de practică a fost realizat la Consiliului Judeţean Botoşani (CJB), în cadrul Serviciului Strategii, Parteneriate şi Cooperare...

Introducere Transportul si constructia sint cele mai importante ramuri în Republica Moldova , care au la bază rezolvarea problemelor necesităţii...

INTRODUCERE De ce am ales ca obiect de studiu analiza statistică a seriei cronologice - şi anume sezonalitatea ? Dezvoltarea şi producerea de...

Cap. I MOTIVAREA TEMEI Microsoft este liderul mondial in produse software, servicii si tehnologii Internet pentru sisteme de calcul personale si...

Proiectul de faţă îşi propune să analizeze factorii care influenţeză producţia de mijloace de transport rutier din România în perioada martie...

Introducere Asigurarea este frecventă atât la nivel individual cât şi la nivelul marilor companii de asigurări care au ca sarcină acoperirea...