Cuprins
- Capitolul I:Tema si datele de proiectare.pag.2
- Capitolul II:Alegerea si verificarea servomotorului.pag. 4
- Capitolul III:Proiectarea convertorului static de putere.pag. 9
- Capitolul IV:Modulatorul duratei impulsurilor.pag. 14
- Capitolul V:Proiectarea etajului de putere.pag. 19
- Capitolul VI:Proiectare sistemului de reglare.pag. 22
Extras din proiect
Capitolul I
Tema si datele de proiectare
1.1 Tema de proiectare
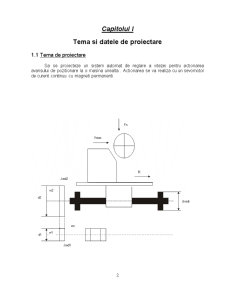
Sa se proiecteze un sistem automat de reglare a vitezei pentru actionarea avansului de pozitionare la o masina unealta . Actionarea se va realiza cu un sevomotor de curent continuu cu magneti permanenti.
1.2 Date de proiectare
Numar de ordine :k = 16
Viteza maxima a avansului :Va = 0.05 [m/s]
Raportul de transmisie :i = 1 + 0.3k = 5.8
Pasul surubului conducator :Hsc = 2.5 + 0.4k = 0.0089 [mm]
Lungimea surubului conducator :Isc = 40(1.5 +0.3k)2 = 1.5876 [mm]
Diametrul surubului conducator :dsc = 4Hsc = 0.0356 [mm]
Masa piesei de lucrat :m1 = 0.5(1 + 3k) = 24.5 [kg]
Masa placii de baza :m2 = 100 + 20k = 420 [kg]
Forta de aschiere tangentiala :Ft =3000 + 250k = 7000 [N]
Forta de aschiere normala :Fn = 0.2Ft = 1400 [N]
Forta de amortizare vascoasa :D = (30 +1.5k)10-4 = 0.0054 [Nms/rad]
Coeficient de frecare a placii de baza :mf = 0.085
Coeficient de frecare din lagarele de rostogolire :mr = 0.006
Diametrul mediu al rulmentiilor :dmedr = 1.8dsc = 0.064 [mm]
Diametrul rotii dintate :d1 = 50 [mm]
Latimea rotii dintate :b = 20 [mm]
Randamentul reductorului :hr = 0.9
Randamentul surubului conducator :hsc = 0.95
Datele din profilul de viteza :
-Timp de accelerare :ta = 1 [s]
-Timp de mentinere :tm = 1 [s]
-Timp de franare :tfr = 1 [s]
-Timp de pauza :tp = 1 [s]
-Durata unui ciclu :tc = ta + tm + tfr + tp = 5 [s]
Densitatea materialului :r = 7800 [kg/m3]
Capitolul II
Alegerea si verificarea servomotorului
2.1 Viteza unghiulara a surubului conducator
Surubul conducator este un surub cu rol in transmiterea miscarii si din acest motiv se va executa cu filet trapezoidal . Filetul prin structura sa este o elice cilindrica si prin urmare miscarea unui punct cu viteza liniara invariabila v pe o elice cilindrica se compune din :
"Miscarea pe cercul de baza al elicei , cu viteza Vcosa ;
"Miscarea pe o axa paralela cu axa elicei , cu viteza Vsina ;
Se obtine astfel: viteza unghiulara a surubului conducator: Ésec = 35.298 [rad/s]
2.2 Viteza unghiulara a servomotorului
2.2.1 Raportul de transmisie :viteza unghiulara a servomotorului: Ém = 204.733 [rad/s]
2.2.2 Turatia sevomotorului :
2.2.3 Momentul de inertie al rotii dintate 1:
2.2.4 Momentul de inertie al rotii dintate 2:
Preview document



























Conținut arhivă zip
- Servosisteme.doc
Alții au mai descărcat și

1. Ball and beam Sistemul „ball and beam” este unul dintre cele mai populare modele pentru lucrul in laborator in domeniul controlului de...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

Dupa cum multi dintre noi cunosc ,atomul este format din particule materiale si anume un nucleu incarcat electric pozitiv si mai multi electroni...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

CAPITOLUL I INTRODUCERE ÎN CONSTRUCŢIA AUTOMOBILELOR I.1. Părţile componente ale automobilelor Principalele parţi componente ale unui automobil...

CAPITOLUL 1. GENERALITǍŢI (FENOMENOLOGIA FRECARII) Frecarea este prezentă în toate maşinile care încorporează părţi în mişcare relativă. Deşi...

CAPITOLUL 1. INTRODUCERE Introducerea pe scară largă a automatizării şi robotizării, realizarea noilor tipuri de maşini unelte cu comanda program...

INTRODUCERE Maşina asincronă are o pondere importantă în acţionările electrice datorită avantajelor pe care le au comparativ cu alte maşini:...

1. SISTEMATICA COMENZILOR MOTOARELOR HIDRAULICE PRIN REZISTENTE HIDRAULICE Reglarea vitezei de deplasare a motoarelor hidraulice se poate face în...

Mecatronica este definită simplu “Ştiinţa maşinilor inteligente”.O maşină inteligentă cuprinde următoarele subsisteme de bază: a. Subsistemul de...

Subiect 1 - Piata globala a energiei Factorii principali care au determinat şi contiunuă să marcheze evoluţia pieţei globale a energiei sunt...

Structura si functionarea sistemelor de pozitionare În aplicatiile industriale foarte adesea este necesara realizarea unor pozitionari precise...