
Cuprins
- Noţiuni abstracte 1. Fuziunea senzorilor 2. Alinierea senzorilor 3. Privire de ansamblu asupra aplicaţiei 4. Senzorii 5. Algoritmul de fuziune a senzorilor 6. Transformările Affine 7. Arhitectura sistemului 8. Sistemul FPGA 9. Transformarea video 10. Procesorul Sabre 11. Concluzie
Extras din proiect
Noţiuni abstracte
Vom prezenta un sistem de senzori folosind dispozitivele de măsurare inerţiale ca bază pentru dezvoltarea unei game de aplicaţii dinamice în timp real de fuziune a senzorilor. Vom folosi o platformă FPGA COTS pentru fuziunea senzorilor şi corectarea în timp real a unui senzor video decalat. Vom exploata un procesor proiectat pe 32 de biti şi o dezvoltare bazată pe designul C pentru o platformă neutră rapidă. Filtrul Kalman şi tehnicile de fuziunea senzorilor stabilite în sistemele avansate de aviaţie sunt aplicate vehiculelor cu rezultate peste cerinţele industriale tipice pentru alinierea senzorilor. Rezultatele testelor statice şi dinamice demonstrează că utilizarea accelerometrelor ieftine montate pe un senzor şi o unitate de măsurare inerţială(IMU) fixate pe un vehicul pot fi folosite pentru a calcula alinierea incorectă a senzorului faţă de IMU şi astfel faţă de vehicul.
1.Fuziunea senzorilor
Sistemele automobilelor de generaţie următoare şi sistemele de asistenţă avansată a conducerii autovehiculelor(ADAS) necesită suprapunerea sau "fuziunea" datelor de la senzori cum ar fi video, radar, laser, sisteme de poziţionare globală şi dispozitive de măsurare inerţială. Tehnicile de fuziunea senzorilor şi anume încorporarea disparată şi datele senzorilor complementari pentru sporirea preciziei sunt bine stabilite în domeniul aviaţiei avansate. Pe măsură ce sistemele auto permit includerea tot mai avansată a senzorilor electronici, producătorii vor cauta noi abordări pentru proiectarea sistemelor si încorporarea dispozitivelor reconfigurabile pentru dezvoltarea şi implementarea rapidă. Ca şi în cazul exemplului discutat aici, fuziunea senzorilor în apărare şi în sistemele aerospaţiale poate oferi unele soluţii.
2. Alinierea senzorilor
Este critic pentru aceste aplicaţii de generaţie următoare faptul că senzorii utilizaţi sunt aliniaţi cu precizie şi în mod continuu realiniaţi unul faţă de celălalt şi faţă de vehicul. Fără alinierea informaţiilor provenite de la un senzor nu se pot combina efectiv informaţiile provenite de la un senzor diferit. În momentul de faţă se utilizează metode costisitoare mecanice şi optice în timpul producţiei vehiculului. În plus, alinierile trebuie să fie repetate dacă un senzor este deranjat sau ulterior reparat/înlocuit după producţie, în vederea asigurării că sistemele de siguranţă critice dau o raportare cu acurateţe. Prin urmare, este de dorit să se alinieze senzorii dinamic prin intermediul calculului digital decât prin mijloace mecanice. Vom prezenta dezvoltarea unui sistem în acest scop.
3. Privire de ansamblu asupra aplicaţiei
Pentru a alinia un senzor, vom folosi o combinaţie de alte două sisteme senzor:
- o unitate de măsură inerţială(IMU) de tipul 6-DOF, ca şi cea din sistemele BAE, constând din 3 giroscoape şi accelerometre, fixate pe vehicul şi;
- un accelerometru cu două axe(ACC), fixat pe senzori pentru a fi aliniaţi.
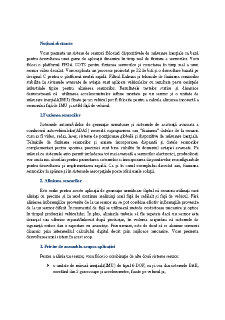
Fixat pe vehicul, IMU defineşte cadrul de referinţă în mişcare al platformei. Se pot calcula modificările unghiulare şi acceleraţiile liniare în raport cu principalele axe ale vehiculului(x, y, z). ACC este fixat pe senzor pentru a fi aliniat şi defineşte axele senzor(x', y', z'). Pe măsură ce vehiculul accelerează, vectorul acceleraţie va fi simţit atât de IMU cât şi de ACC (figura 1).
Figura 1. Cadrele de referinţă ale senzorului şi vehiculului
Orice diferenţă în componentele de accelerare de-a lungul axelor senzorilor este un rezultat al decalajului dintre cele două erori ale instrumentelor individuale. Vom exploata aceste diferenţe faţă de alinierea senzorului. Vom calcula decalajul senzorului utilizând un algoritm de fuziunea senzorului încorporând un filtru Kalman. Filtrul Kalman generează un nivel de încredere statistică în valorile nealiniate. Pentru vizualizare am ales o camera video pentru senzorii decalaţi; cu toate acestea, metoda se extinde la alinierea oricui tip de senzor semnificativ direcţional. Unghiurile nealiniate reprezintă intrări pentru calculul şi afişarea unei versiuni realiniate a intrării video în timp real.
Preview document











Conținut arhivă zip
- Exploatarea in Timp Real a FPGA-urilor Bazate pe Tehnologia de Fuziune a Senzorilor pentru Sistemele de Securitate de Generatie Urmatoare din Industria Auto.pdf
Alții au mai descărcat și

Abstract: The project is to use VHDL and FPGA to design an digital clock that has digital display. Basically, the design can display minutes and...

Rezultatele din testul 3DS Max 7 SPECapc Test Testul alaturat consta in crearea modelelor 3D, modificarea si randarea scripturilor. Conform...

Introducere O semnatura digitala reprezinta o informatie care il identifica pe expeditorul unui document. Semnatura digitala este creata prin...

Acest sistem calculeaza gradul de avariere a unei cladiri în cazul unui cutremur, precum si posibila necesitate a reconstructiei cladirii (partiala...

1.1. Rolul FPGA (Field Programmable Gate Array) Reprezinta o necesitate in design-ul sistemelor digitale avand un rol complementar celor jucat de...