Cuprins
- I. Generalităţi
- I.1. Sistemele de acţionare.
- I.2. Motoare pas cu pas (construcţie şi funcţionare, clasificare, definiţii).
- II. Datele proiectului. Schema generală a sistemului de acţionare proiectat.
- III. Calculul momentului de inerţie redus şi al momentului rezistent redus. (Mathcad)
- IV. Modelul matematic al motorului. Rezolvarea sistemului de ecuaţii diferenţiale (simulare Matlab)
- V. Simularea motorului în Matlab - Simulink. Alegerea motorului în funcţie de graficele Matlab – Simulink.
- VI. Comanda motorului folosind mediul de lucru programul LabView.
- VII. Determinarea stabilităţii sistemului.
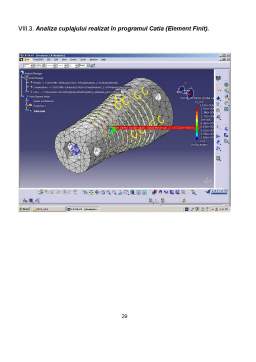
- VIII. Desenarea şi schiţa cuplajului (Catia). Analiza cuplajului (Element finit).
Extras din proiect
I. GENERALITĂŢI
I.1. Sistemele de acţionare
Prin element de acţionare electrică se înţelege un motor electric ce urmăreşte un semnal de comandă (acest semnal poate fi tensiune electrică sau curent electric), pe care îl transformă într-un semnal mecanic (deplasare liniară/unghiulară sau viteză liniară/unghiulară) pentru a obţine un randament energetic.
Pentru microacţionări, elementul de acţionare (motorul electric) are în plus proprietatea de a fi un convertor electro-mecanic ~ să respecte proporţionalitatea între mărimea electrică de comandă şi mărimea mecanică de ieşire (semnalul de ieşire).
Sistemele de acţionare sunt compuse dintr-un element de acţionare, dintr-un dispozitiv de lucru (mecanism acţionat) şi traductorul de viteză şi / sau poziţie. Acestea reprezintă totalitatea elementelor din componenţa dispozitivelor de lucru şi a instalaţiilor, care asigură mişcarea elementelor conducătoare după o anumită lege în conformitate cu funcţiile stabilite pentru aceste elemente.
O caracteristică a elementelor de acţionare o reprezintă reversibilitatea (elementul de acţionare poate funcţiona atât în regim de motor cât şi în regim de generator).
Din punct de vedere energetic un sistem de acţionare transformă energia primită de la o sursă de energie primară, în lucru mecanic util, pe care apoi îl furnizează mecanismelor acţionate. Transmiterea se face prin intermediul arborilor pentru mişcarea de rotaţie, sau prin intermediul tijelor pentru mişcarea de translaţie alternativă.
Clasificare:
Marea majoritate a elementelor de acţionare funcţionează în trei regimuri, şi anume:
- Regim de motor (primeşte energie electrică şi cedează sistemului acţionat energie de natură mecanică);
- Regim de generator (are o comportare exact opusă decât cea din regimul de motor);
- Regim de generator (are o comportare exact opusă decât cea din regimul de motor);
- Regim de frână electrică (primeşte atât energie electrică cât şi energie de natură mecanică pe care le transformă în căldură).
I.1.1. Clasificarea elementelor de acţionare electrice în funcţie de modul de alimentare:
- Motoare de curent continuu (şi ca un caz particular servomotoare de curent continuu care au performanţe mai bune în ceea ce priveşte mişcarea incrementală a poziţiei şi a vitezei);
- Motoare de curent alternativ care sunt la rândul lor de două tipuri, şi anume:
- Sincrone (frecvenţa curentului de comandă este în raport constant cu turaţia motorului);
- Asincrone (frecvenţa curentului de comandă depinde de încărcarea motorului).
I.1.2. Cerinţe importante ale motoarelor electrice:
Trebuie să aibă o mare amplitudine (gamă largă) de variaţie a vitezei;
Să fie autofrânat în absenţa semnalului de comandă;
Să aibă variaţii largi ale cuplului/forţei în funcţie de gama de viteze controlate;
Răspunsul electric şi electromecanic să fie rapid (se controlează prin constanta mecanică şi constanta electrică a motorului);
Caracteristica mecanică (diagrama M - ) să fie aproximativ liniară, ceea ce ajută la utilizarea motorului în Sistemele de Reglare Automată;
Caracteristicile de reglare: semnal de comandă – poziţie şi semnal de comandă – viteză trebuie să fie univoce;
Posibilitatea motorului de a lucra în sistem închis şi de a-şi menţine poziţia.
I.1.3.Avantajele acţionării electrice sunt:
1. Disponibilitate de energie mare, care poate fi stocată pe termen lung.
2. Fluxul de putere electrică, se pretează cel mai bine la automatizări, ceea ce duce la obţinerea unor performante maxime în funcţionare.
3. Pot fi comandate de la distanţă.
4. Este constituită din elemente modularizate, tipizate care se pretează miniaturizării.
5. Randamentul acestor tipuri de acţionări este mult mai mare decât la celelalte tipuri de acţionări.
6. Sunt silenţioase şi fiabile.
7. Reglarea vitezei se face într-un raport foarte mare 10.000 : 1, performanţă care este mult superioară celorlalte tipuri de acţionări.
8. Timpul de răspuns la motoarele electrice speciale utilizate pentru automatizări sunt net superioare celorlalte tipuri de acţionări.
Preview document
























Conținut arhivă zip
- Actionari Electrice si Electronica de Putere - Motor Pas cu Pas.doc
Alții au mai descărcat și

CAPITOLUL 1 Sisteme de reglare pentru acţionări electrice 1.1 Sisteme cu buclă deschisă şi bucla închisă Sistemele de control, în general, pot...

INTRODUCERE De la realizarea primului tranzistor bipolar (1947), s-a diversificat continuu gama dispozitivelor semiconductoare de putere (diode,...

REZISTOARE Definitie: Rezistoarele sunt elemente de circuit a caror functionare se bazeaza pe proprietatea tuturor materialelor conductoere de a...

1.Consideraţii teoretice Sistemele de acţionare sunt compuse dintr-un element de acţionare, dintr-un dispozitiv de lucru (mecanism acţionat) şi...

Introducere Convertoarele statice sunt echipamente de putere care permit conversia unei energii de curent alternativ într-o energie de curent...

Simularea unei acţionări cu motor de curent continuu cu excitaţie derivaţie Autori: • student an III AIA, UAV Arad • student an III AIA, UAV...

I. INTRODUCERE Punctul de pornire al acestui proiect este cerinta de proiectare a unui sistem de comanda pentru motorul pas cu pas folosind un...

1. Introducere Circuitele de conversie c.c. - c.c. au fost redenumite choppere odată cu apariţia comutatoarelor pe siliciu (tiristoare, triace)....
Te-ar putea interesa și

CAPITOLUL I INTRODUCERE I.1 GENERALITĂŢI Motoarele electrice sunt o componentă esenţială a societăţii actuale (puternic industrializată), cu nu...

1.Introducere: 1.1. Tema lucrării Perfecţionarea standului pentru verificarea franelor si cuplajelor electromagnetice cu destinatie de laborator,...

ARGUMENT Maşinile electrice realizează transformarea energiei electrice in energie mecanica (motoare electrice sau electromotoare ), sau a...

GENERALITATI In procesele industriale trebuie actionate – puse in miscare – sisteme mecanice. Transformarea diferitelor forme de energie...

Transformatorul electric este un aparat electromagnetic static, având doua sau mai multe înfasurari electrice cuplate magnetic care transforma...

1 Introducere Masinile electrice speciale constituie componente de o deosebita importanta pentru sistemele automate îndeplinind functii diverse:...

Schema bloc a unui sistem de acţionare electric este cea din figura 10.1. Figura 10.1. Schema structurală a unui sistem de acţionare electric...

CAPITOLUL 1 ELEMENTE DE MECANICA ACŢIONĂRILOR ELECTRICE 1.1. Introducere Scopul principal al unei acţionări electrice este antrenarea, pe cale...