Cuprins
- I. Mecanism cu bare articulate (pag. 3)
- 1. Identificarea cuplelor si a elementelor cinematice (pag. 5)
- 2. Analiza cinematica:
- - calculul vitezelor (pag. 6)
- - calculul acceleratiilor (pag. 10)
- 3. Analiza cinetostatica (pag. 15)
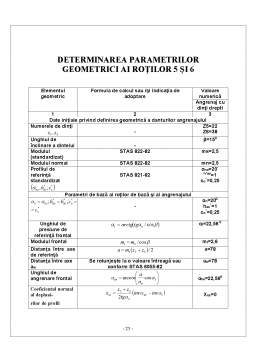
- II. Proiectarea unui mecanism cu roti dintate (pag. 23)
Extras din proiect
Mecanism cu bare articulate
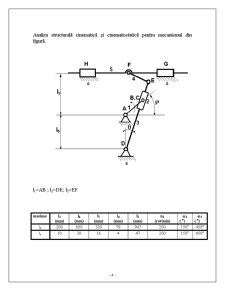
Analiza structurală cinematică şi cinematostatică pentru mecanismul din figură.
l1=AB ; l2=DE; l3=EF
marime l1
(mm) l6
(mm) l7
(mm) l4
(mm) l3
(mm) n1
(rot/min) φ1
( o) φ1
( o)
lr 200 600 320 79 947 250 150o 450o
ls 10 30 16 4 47 250 150o 450o
Identificarea cuplelor şi a elementelor cinematice
Prin element cinematic ser înţelege un corp solid constituit dintr-o piesă mecanică sau din mai multe piese îmbinate rigid între ele. Elementele cinematice se consideră rigide în majoritatea cazurilor.
Cupla cinematică este legătura mobilă dintre două elemente cinematice, formată prin contact direct între suprafeţele lor.
Cuplele cinematice se clasifică după mai multe criterii. Astfel ele se împart în 5 clase – clasa fiind egală cu gradul de restrictivitate.
Gradul de restrictivitate este reprezentat de numărul de mişcări elementare care se pot executa [k ( )]. Gradul de restrictivitate poate fi interpretat ca fiind egal cu numărul de condiţii care intervin între parametrii de poziţie sau de viteză ai celor două elemente.
Clasificarea cuplelor cinematice după:
- Mişcarea relativă dintre elemente:
- Cuple Plane (mişcare plan-paralelă);
- Cuple Spaţiale (mişcare relativ spaţială).
- Modul de construcţie:
- Cuple Închise (atunci când legăturile împiedică deplasările în ambele sensuri – caracterizate prin contact bilateral);
Cuple Deschise (atunci când legăturile sunt împiedicate numai într-un singur sens – caracterizate prin contact unilateral)
Kl = 0,02
n=6
C5 = 7(A,B,C,D,E,F,G)
M = 3( n - 1 ) - 2C5 - C4 = 1
f=3
Preview document


























Conținut arhivă zip
- Mecanism cu Bare Articulate.doc
Alții au mai descărcat și

TEMA DE PROIECT Sa se proiecteze o transmisie mecanica pentru actionarea unei masini de lucru. Transmisia mecanica este de forma: a) motor...

Sinteza Dimensională Sinteza dimensională constă in determinarea parametrilor constructivi ai mecanismului pornind de la condiţiile funcţtionale...

1. Tema de proiectare Sa se proiecteze principalele dimensiuni ale mecanismului complex din figura. Se dau urmatoarele date initiale: - É1=100...

TEMA PROIECTULUI Sa se proiecteze un cric auto cu parghii pentru o sarcina maxima F=15000 [N] care sa respecte urmatoareleconditii tehnice :...

Tema proiectului Mecanismul manivela – piston Sa se proiecteze mecanismul unui motor cu ardere interna in patru timpi cunoscand : - schema...

Tema de proiect Se dă un mecanism ce face parte din ansamblul unei maşini unelte având schema cinematică prezentată mai jos împreună cu datele...

1. Memoriul de prezentare 1.1. Descrierea generala a cricului Din punct de vedere constructiv, cricul este alcatuit dintr-un numar de 8 bare, un...

Să se proiecteze mecanismul articulat de suspensie din figură: Date tehnice: • encartamentul: B = 1513 mm • ampatamentul: L =2511 mm • raza...
Te-ar putea interesa și

1. Memoriu justificativ Automobilul pentru a se deplasa are nevoie de un sistem de directie, care dirijeaza automobilul pe traiectoriea dorita de...
Sinteza Dimensională Sinteza dimensională constă in determinarea parametrilor constructivi ai mecanismului pornind de la condiţiile funcţtionale...

INTRODUCERE Masinile unelte aschietoare, împreuna cu presele si ciocanele folosite la prelucrarea prin deformare plastica stau la baza utilajelor...

2 STUDIU DE NIVEL PRIVIND MECANISMELE DE GHIDARE A ROŢILOR CU BRATE INEGALE 2.1 MODALITATI DE AMPLASARE A AMORTIZORULUI 2.2 FUNCŢIUNILE...

Capitolul 2 Argument 2.1.Introducere.Generalitati Autoturismul este un vehicul rutier suspendat elastic pe roti,care se deplaseaza prin mijloace...

1 STUDIU DE NIVEL PRIVIND MECANISMELE DE GHIDARE A ROŢILOR Mecanismul de ghidare a roţilor are rolul de a prelua forţele şi momentele reactive ce...

MECANISMUL DE GHIDARE • Are rolul de a realiza o legatura corecta a rotilor cu caroseria. • Trebuie sa permita anumite miscari sau sa...

TEMATICA ŞI CONŢINUTUL PROIECTULUI DE SEMESTRU LA MECANISME Numele şi prenumele studentului : Conţinutul proiectului Se consideră o maşină...