Extras din referat
Filtrul Kalman este un filtru eficient recursiv care estimeaza starea unui sistem dinamic de la o serie de măsurători incomplete şi zgomotoase. Acesta a fost dezvoltat de Rudolf Kalman. Împreună cu regulatorul liniar-patratic (LQR/RLP), filtrul Kalman rezolvă problema linear-patratică-Gaussiană de control (LQG/LPG). Filtrul Kalman, regulatorul liniar-pătratic şi controller-ul liniar-pătratic-Gaussian sunt soluţii la ceea ce, probabil, sunt cele mai importante probleme în teoria de control.
Filtrul Kalman este o tehnică matematică utilizată pe scară largă în sistemele de control şi avionics (electronica aerospatială) pentru a extrage un semnal de la o serie de măsurători incomplete şi zgomotoase.
Rudolf Emil Kálmán (Mai 19, 1930) este un teoretician ungaro-american al sistemului matematic şi un profesor emerit la Swiss Federal Institute of Technology, care este renumit pentru co-inventarea filtrului Kalman, o tehnică matematică utilizată pe scară largă în sistemele de control şi avionics (electronică aerospatială).
El a primit Medalia de Onoare IEEE în 1974, Medalia Centenară IEEE in 1984, Premiul Kyoto al fundatiei Inamori în înalta tehnologie în 1985, Premiul Steele al American Mathematical Society în 1987, Premiul Richard E. Bellman Control Heritage în 1997 , şi Premiul ANOFM Charles Stark Draper în 2008.
Exemplu de aplicatie
Un exemplu de aplicatie ar fi furnizarea de informaţii precise-actualizate continuu despre poziţia şi viteza unui obiect, date doar de o secvenţă de observaţii cu privire la poziţia sa, fiecare incluzand unele erori. Este utilizat într-o gamă largă de aplicaţii de inginerie de la radar la computer vision. Filtrarea Kalman este un important subiect in teoria de control si in sistemele de control şi de inginerie.
De exemplu, într-o aplicatie de radar, în cazul în care unul este interesat în a urmări o ţintă, informaţii despre locaţie, viteză, si acceleraţia ţintei este măsurată cu o mare parte a erorilor generate prin zgomot în orice moment de timp. Filtrul Kalman exploateaza dinamica ţintei, care sa supravegheze evolutia timp, pentru a elimina efectele de zgomot şi pentru a obţine o bună estimare a locaţiei ţintei în prezent (filtrarea), la un timp viitor (de predicţie), sau la un moment dat în trecut (facilitarea de interpolare). O versiune simplificată a unui filtru Kalman este filtrul alfa beta, tot mai frecvent utilizate, care are constante statice de pondere în loc de a folosi matrici de covarianţa.
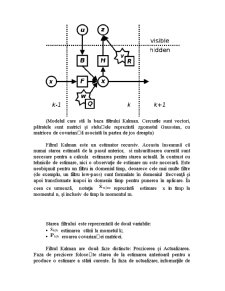
Filtrele Kalman se bazează pe sisteme dinamice liniare discrete in domeniul timp. Acestea sunt modelate dupa un lanţ Markov construit pe operatori liniari perturbați de zgomot Gaussian. Starea sistemului este reprezentată ca un vector de numere reale. La fiecare increment discret in domeniul timp, este aplicat un operator liniar de stare pentru a genera noi stări, amestecat cu zgomot şi, opţional, unele informaţii de la controalele sistemului, dacă acestea sunt cunoscute. Apoi, un alt operator liniar amestecat cu zgomot generează ieșiri vizibile de la starea `ascunsă`. Filtrul Kalman poate fi privit ca un analog al modelului Markov , cu diferenţa că variabilele stării `ascunse` iau valori într-un spaţiu continuu (spre deosebire de un spaţiu discret de stat ca şi în modelul Markov ascuns). În plus, modelul Markov ascuns poate reprezenta o distribuţie aleatoare pentru următoarea valoare de stare a variabilelor, în contrast cu modelul Gaussian de zgomot care este utilizat pentru filtru Kalman. Există o puternică dualitate intre ecuațiile filtrului Kalman şi cele ale modelului Markov ascuns. O revizuire a acestora şi a altor modele este dată în Roweis şi Ghahramani (1999).
(Modelul care stă la baza filtrului Kalman. Cercurile sunt vectori, pătratele sunt matrici şi steluțele reprezintă zgomotul Gaussian, cu matricea de covarianță asociată în partea de jos dreapta)
Filtrul Kalman este un estimator recursiv. Aceasta înseamnă că numai starea estimată de la pasul anterior, si măsurătoarea curentă sunt necesare pentru a calcula estimarea pentru starea actuală. În contrast cu tehnicile de estimare, nici o observaţie de estimare nu este necesară. Este neobişnuit pentru un filtru in domeniul timp, deoarece cele mai multe filtre (de exemplu, un filtru low-pass) sunt formulate în domeniul frecvenţă şi apoi transformate inapoi in domeniu timp pentru punerea în aplicare. În ceea ce urmează, notaţia reprezintă estimare in timp la momentul n, şi inclusiv de timp la momentul m.
Preview document















Conținut arhivă zip
- Filtrul Kalman.doc
Alții au mai descărcat și

Filtrele adaptive Adaptarea reprezinta capacitatea unui organism de a se modifica in raport cu schimbarile intervenite in conditiie sale de viata....


3. Functionarea În general, pentru realizarea stabilizatoarelor de tensiune se folosesc proprietatile diodelor. Cel mai simplu tip de...

Scopul lucrării: Sa facem cunoștința cu semnalul biomedicale, cu modul de utilizare a cardiografului, prelucrarea semnalului acestuia şi a...
Te-ar putea interesa și

Pendulul invers 1. Tema proiectului o constituie un pendul invers montat pe un carucior actionat de un motor de current continuu avand turatia...

CAPITOLUL I Introducere în filtre Kalman 1 .Introducere Teoretic, un filtru Kalman este un estimator pentru problema liniar pătratică. Aceasta...

Noţiuni abstracte Vom prezenta un sistem de senzori folosind dispozitivele de măsurare inerţiale ca bază pentru dezvoltarea unei game de aplicaţii...

Cap.l Proiectarea SAS 1.l Analiza dinamicii longitudinale nereglate Pentru analiza raspunsurilor în timp la comenzi treapta unitate si impuls se...

1. INTRODUCERE Tema propusa are ca obiectiv principal aplicarea actionarilor electrice cu motoare de inductie fara senzori mecanici la...

INTRODUCERE În cursul ultimelor două decenii, cercetatorii in roboti mobili au avut de aface cu diferite metode de planificare.In majoritatea...
Filtrele adaptive Adaptarea reprezinta capacitatea unui organism de a se modifica in raport cu schimbarile intervenite in conditiie sale de viata....
