Extras din curs
5.1 SISTEME CONTINUE
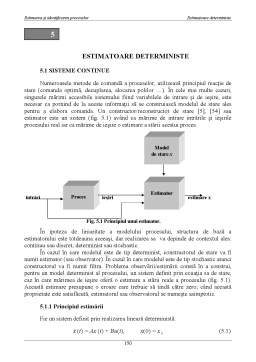
Numeroasele metode de comandă a proceselor, utilizează principiul reacţie de stare (comanda optimă, decuplarea, alocarea polilor …). În cele mai multe cazuri, singurele mărimi accesibile sistemului fiind variabilele de intrare şi de ieşire, este necesar ca pornind de la aceste informaţii să se construiască modelul de stare ales pentru a elabora comanda. Un constructor/reconstructor de stare [5], [54] sau estimator este un sistem (fig. 5.1) având ca mărime de intrare intrările şi ieşirile procesului real iar ca mărime de ieşire o estimare a stării acestui proces.
intrări ieşiri estimare x
Fig. 5.1 Principiul unui estimator.
În ipoteza de liniaritate a modelului procesului, structura de bază a estimatorului este totdeauna aceeaşi, dar realizarea sa va depinde de contextul ales: continuu sau discret, determinist sau stochastic.
În cazul în care modelul este de tip determinist, constructorul de stare va fi numit estimator (sau observator). În cazul în care modelul este de tip stochastic atunci constructorul va fi numit filtru. Problema observării/estimării constă în a construi, pentru un model determinist al procesului, un sistem definit prin ecuaţia sa de stare, caz în care mărimea de ieşire oferă o estimare a stării reale a procesului (fig. 5.1). Această estimare presupune o eroare care trebuie să tindă către zero; când această proprietate este satisfăcută, estimatorul sau observatorul se numeşte asimptotic.
5.1.1 Principiul estimării
Fie un sistem definit prin realizarea lineară deterministă:
(t) = Ax (t) + Bu(t), x(0) = x (5.1)
y(t) = Cx(t),
unde , reprezintă timpul , mărimea de intrare a procesului, y(t) mărimea de ieşire măsurată a procesului, x(t) mărimea de stare a modelului, iar A, B, C, sunt matrice constante de dimensiuni adaptabile.
În cazul în care procesul prezintă o transmisie directă intrare - ieşire, y=Cx + Du, modelul se reduce la cazul anterior înlocuind = y- Du în 5.1.
Dacă se exceptă cazul trivial, unde matricea C este ireversibilă, singurele mărimi accesibile modelului sunt u şi y. Pentru estimarea stării x din ecuaţiile 5.1, o primă soluţie ar fi de a simula în paralel modelul 5.1 sub forma:
(t)=A (t)+Du(t) (5.2)
unde este o estimare a lui x (se convine această notaţie pentru rezultat). Această soluţie nu ţine cont că intrările sunt inacceptabile: pe de-o parte eroarea de estimare = , creşte exponenţial în cazul unui model instabil, pe de altă parte orice comandă u = f(x), calculată în buclă închisă este implantată sub forma u=f( ) devine în realitate o comandă în buclă deschisă. Principiul de construcţie a unui estimator constă în a corecta dinamica estimării din 5.2, ţinând cont de diferenţa dintre ieşirea reală şi ieşirea reconstruită. Aceasta conduce estimatorul la:
(t)=A (t)+Bu(t)+K[y(t)-C (t)], (5.3)
unde K este factorul de amplificare al estimatorului. Notând = A-KC, ecuaţia 5.3 poate fi scrisă sub forma:
(t)= (t)+Bu(t)+Ky(t). (5.4)
Fie =x- eroarea de estimare, din ecuaţiile 5.1 şi 5.3 rezultă:
(t)= (t), (0)=x - . (5.5)
În aceste condiţii fiind o estimare a priori a stării iniţiale (5.1), nu se poate avea (0)= 0 în mod general.
Estimatorul definit de ecuaţia 5.4 este satisfăcut asimptotic dacă lim (t)=0 sau dacă este o matrice Hurwitz (valori proprii a lui au partea reală negativă).
Teorema 1. Valorile proprii ale ecuaţie A-KC pot fi fixate arbitrar dacă şi numai dacă perechea (A, C) este observabilă.
Dacă condiţiile din aceasta teoremă sunt verificate, se poate spune :
rang [C , A C , A C , ….., A C ]= n , (5.6)
unde este lăsată o mare libertatea utilizatorului pentru a fixa matricea K. În general,
se aleg valorile proprii a lui astfel încât părţile reale negative să fie mult mai mari în modul ca valorile proprii ale matricei A. Astfel, dinamica erorii de estimare/observare este mai rapidă decât cea a procesului. Cu toate acestea, nu se pot lua la infinit mărimi deoarece var creşte banda de trecere a constructorului nepermiţând neglijarea zgomotelor. La acest nivel se constată că matricele A-KC şi A –C K au aceleaşi valori proprii, în aceste condiţii alegerea matricei K poate fi definită direct plecând de la metodele de alocare a polilor lucrând cu perechea (A , -C ) care este controlabilă dacă (A, C) este observabilă. Mai mult, este posibil a realiza o matrice K ca un câştig care minimizează un criteriu de tip pătratic al erorii de reconstrucţie .
Preview document































Conținut arhivă zip
- Estimatoare Deterministe.doc
Alții au mai descărcat și

Capitolul 2 Sisteme Conventionale pentru Reglarea Proceselor Continue Rezumat: In acest capitol sunt tratate aspecte legate de metodologia...

Reprezentarea Sistemelor Dinamice Liniare Multivariabile prin Matrice de Transfer 1. Matricea de transfer; legatura cu reprezentarile de tip...

Informatiile pe care le reprezentam în memoria calculatorului sunt rareori atât de simple precum culorile sau literele. În general, dorim sa...

1.1. Contextul actual La sfârsitul secolului al XX-lea si începutul secolului al XXI-lea, clientii, concurenta si schimbarea au creat o noua lume a...

Cuvinte importante: - concepte fundamentale ale programarii orientate obiect in Java: incapsulare, mostenire, polimorfism; - crearea claselor de...

Posta electronica (e - mail) Milioane de oameni sunt conectati într-un fel sau altul la reteaua Internet si pot trimite mesaje prin intermediul...

Titlul acestui subcapitol sugereaza utilizarea unor tehnici si a unor sisteme de conducere de tipul celor mentionate în primul capitol care sa...

ARHITECTURA MODELULUI OSI/ISO Modelul ISO/OSI (International Standards Organization / Open Systems Interconnection) este o arhitectura de retea...
Te-ar putea interesa și

CAPITOLUL 1 METODA DRUMULUI CRITIC (CPM) 1.1. Consideratii generale Metoda Drumului Critic este o metodă euristică bazată pe teoria grafelor,...

Decizia mangerială asistată de calculator pentru indeplinirea obiectivelor propuse la S.C VALORIS S.R.L 1.Situaţia tehnico-economică şi de...

Se pune problema proiectării unui filtru de estimare pentru a reface un semnal x[n], care a fost folosit într-o convoluţie cu un filtru liniar...

Sub1.Prelucrarea semnalelor are un rol important în comunicaţii, automatică,înregistarea electronică a imaginilor şi sunetului, prelucrarea...

1.1 Resursele umane în contextul resurselor economice Abordari conceptuale rice organism viu, pentru a exista si a evolua trebuie sa-si poata...

1. MODELAREA ECONOMICO-MATEMATICĂ. METODE. CONCEPTE. CLASIFICĂRI. - Modelarea economică-Generalităţi Problematica modelarii si simularii...

Prelucrarea numerica a semnalelor (PNS) este un domeniu al stiintei care s-a dezvoltat foarte rapid in ultimii 30 de ani, ca urmare a progresului...

6.1. FILTRU WIENER Problema filtrării constă în a determina estimarea variabilelor sistemului atunci când mediul în care se desfăşoară procesul...