Extras din curs
1. INTRODUCERE
1.1. Terminologia de baza
Elemente si articulatii:
Elementele sunt partile solide ale structurii unui robot iar articulatiile sunt parti-le mobile prin care se realizeaza cuplarea între ele a doua elemente consecu-tive. Articulatiile mai sunt numite si cuple care pot fi doua tipuri. Cupla de translatie si cupla de rotatie.
Grad de libertate:
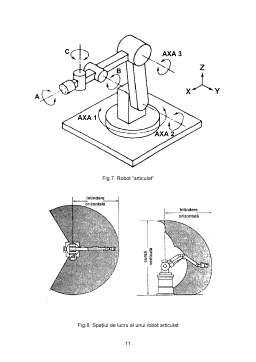
Fiecare articulatie a unui robot introduce un singur grad de libertate. Aceasta poate sa fie o translatie de-a lungul axei de miscare a articulatiei sau o rotatie în jurul acestei axe. Robotii în mod tipic sunt prevazuti cu 5 sau 6 grade de mobilitate.
Grad de mobilitate:
Atunci când se vorbeste despre numarul totatal al miscarilor independente ale unui robot, în loc de grad de libertate se utilizeaza termenul de grad de mobili-tate. Premele 3 grade de mobilitate asigura pozitionarea în spatiul 3D, pâna când ultimele 2 sau 3 orientarea corespunzatoare a obiectului manipulat. 6 grade de mobilitate, adica 6 miscari independente corespunzatoare celor 6 ar-ticulatii permite robotului atât deplasarea obiectului manipulat în orice punct din spatiul sau de lucru cât si orientarea dorita a obiectului în acest punct. 5 grade de mobilitate introduce o restrictie în orientare. Robotii cu 5 grade de mobilitate sunt utilizate în general pentru manipularea unor scule cum ar fi electrodul de sudura.
Punct caracteristic:
Este un punct atasat obiectului manipulat. În conducerea unui robot se pune problema urmaririi evolutiei în timp si spatiu a pozitiei punctului caracteristic.
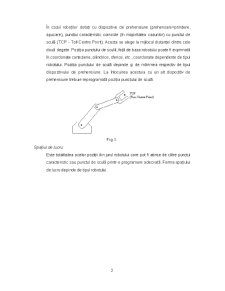
Punctul de scula:
În cazul robotilor dotati cu dispozitive de prehensiune (prehensare=prindere, apucare), punctul caracteristic coincide (în majoritatea cazurilor) cu punctul de scula (TCP - Toll Centre Point). Acesta se alege la mijlocul distantei dintre ce-le doua degete. Pozitia punctului de scula, fata de baza robotului poate fi ex-primata în coordonate carteziene, cilindrice, sferice, etc., coordonate depen-dente de tipul robotului. Pozitia punctului de scula depinde si de marimea res-pectiv de tipul dispozitivului de prehensiune. La înlocuirea acestuia cu un alt dispozitiv de prehensiune trebuie reprogramata pozitia punctului de scula.
Fig.1.
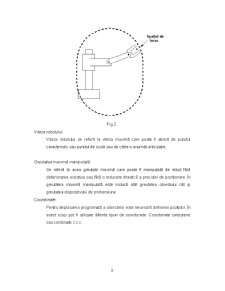
Spatiul de lucru:
Este totalitatea acelor pozitii din jurul robotului care pot fi atinse de catre punc-tul caracteristic sau punctul de scula printr-o programare adecvata. Forma spatiului de lucru depinde de tipul robotului.
Fig.2.
Viteza robotului:
Viteza robotului se refera la viteza maxima care poate fi atinsa de punctul ca-racteristic sau punctul de scula sau de catre o anumita articulatie.
Greutatea maxima manipulata:
Se refera la acea greutate maxima care poate fi manipulata de robot fara de-teriorarea acestuia sau fara o reducere drastica a preciziei de pozitionare. În greutatea maxima manipulata este inclusa atât greutatea obiectului cât si gre-utatea dispozitivului de prehensiune.
Coordonate:
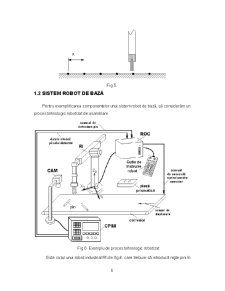
Pentru deplasarea programata a obiectelor este necesara definirea pozitiilor. În acest scop pot fi utilizate diferite tipuri de coordonate: Coordonate cartezie-ne sau cordonate c.c.c.
Fig.3.
Coordonatele cartezine x, y, z indica pozitia relativa a punctului caracteristic P fata de sistemul de coordonte X0Y0Z0 legat de baza robotului. Defapt x, y si z indi-ca distanta punctului P fata de originea O0 masurat de-a lungul axelor X0,Y0
Preview document


























































Conținut arhivă zip
- Robotica
- ROB1.DOC
- ROB2.DOC
- ROB3.DOC
- ROB4.DOC
- ROB5.DOC
Alții au mai descărcat și

1. Generalitati. În practica industriala de pâna acum, automatizarea se realiza mai ales în cadrul unor sisteme rigide de tipul liniilor de...

Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte insemnata din efortul...

Se considera un robot destinat unei linii de acoperire galvanica. Procesul tehnologic intr-o astfel de linie cuprinde 6 posturi, 5 pentru...

Definirea sistemului flexibil de prelucrare Sistemul flexibil de prelucrare SFP poate fi definit ca un ansamblu integrat de maşini-unelte...

Robotul 1 preia piesele de masa rotativa si le depune in bufferul corespunzator de la i1, i2, i3. Piese;e sunt luate numai din pozitia PA1 rotind...

INTRODUCERE În cursul ultimelor două decenii, cercetatorii in roboti mobili au avut de aface cu diferite metode de planificare.In majoritatea...

Enunt: Se considera montajul de mai jos: In linia de fabricatie prezentata mai sus sunt prelucrate trei tipuri de piese. Linia este formata din...

1. SISTEME DE REGLARE AUTOMATĂ (SRA) Întrucât nu este prevăzut un calculator pentru conducere în regim de supra¬veghere, modificarea mărimii de...
Te-ar putea interesa și

CAPITOLUL 1 Modelare si strategii de conducere a manipulatoarelor robotice 1.1. Introducere în problematica robotilor industriali Notiunea de...

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

1. Introducere Proiectul are ca scop controlul unui brat robotic care urmareste miscarea unui brat real. Pentru captarea pozitiei bratului...

1. Introducere Denumirea ROBOT a fost introdusă de către scriitorul ceh Karl Capek în lucrarea sa ,,Roboţii universali ai lui Rossum”,(1921),...

1.Introducere Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte...

CAPITOLUL 1 INTRODUCERE 1.1. GENERALITATI Robotica reprezintă un domeniu de ştiinţă multidisciplinar, care cuprinde elemente de Fizică,...

Introducere SUA şi Uniunea Europeană se confruntă cu un mare deficit de forţă de muncă în agricultură unde ponderea o are munca la negru şi...

Capitolul 1 1.1 Prezentare generala a tipului de aplicatie de la licenta Paletizarea reprezinta operatia de dispunere voluminca ordonata, in plan...