Extras din curs
Sisteme automate liniare multivariabile
5.1. Procese tehnologice cu mai multe mărimi de ieşire şi intrare
În practică, majoritatea proceselor tehnologice sunt caracterizate de mai multe mărimi de intrare şi ieşire impunându-se reglarea mai multor mărimi de ieşire.
Corespunzător numărului de mărimi de ieşire din proces supuse reglării, se impune şi utilizarea unui număr adecvat de elemente de execuţie şi de traductoare
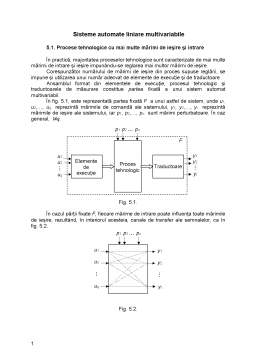
Ansamblul format din elementele de execuţie, procesul tehnologic şi traductoarele de măsurare constitue partea fixată a unui sistem automat multivariabil.
În fig. 5.1, este reprezentată partea fixată F a unui astfel de sistem, unde u1, u2,…, uq reprezintă mărimile de comandă ale sistemului, y1, y2,…, yl reprezintă mărimile de ieşire ale sistemului, iar p1, p2,…, pn sunt mărimi perturbatoare. În caz general, l≠q.
Fig. 5.1.
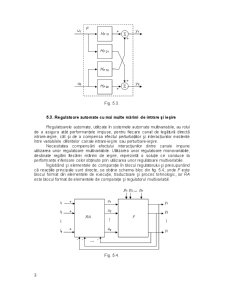
În cazul părţii fixate F, fiecare mărime de intrare poate influenţa toate mărimile de ieşire, rezultând, în interiorul acesteia, canale de transfer ale semnalelor, ca în fig. 5.2.
Fig. 5.2.
Cum partea fixată F este liniară, pentru fiecare canal de transfer se poate defini o funcţie de transfer:
(5.1)
Partea fixată F fiind liniară, mărimile de ieşire se calculează funcţie de cu l linii şi q coloane
(5.2)
Acest sistem poate fi exprimat sub formă matriceal-vectorială astfel:
(5.3)
respectiv:
Y(s) = HF(s) U(s) (5.4)
unde:
HF(s) - matricea de transfer a părţii fixate multivariabile, cu l linii şi q coloane;
Y(s) - vectorul coloană al transformatelor Laplace directe ale mărimilor de ieşire, cu l componente;
U(s) - vectorul coloană al transformatelor Laplace directe ale mărimilor de comandă, cu q componente.
5.2. Parte fixată cu două mărimi intrare şi două mărimi de ieşire
Se consideră partea fixată a unui astfel de sistem cu două mărimi intrare şi două mărimi de ieşire, adică l=q=2.
Preview document













Conținut arhivă zip
- Sisteme Automate Liniare Multivariabile.doc
Alții au mai descărcat și

Scop: Parcurgerea in latime se foloseste: - pentru Inteligenta Artificiala (metoda neinformata de cautare... mai multe la cursul de IA); -...


În evoluţia sa omenirea a fost preocupată de realizarea unor dispozitive, mijloace tehnice, care să solicite cât mai puţin prezenţa omului pentru o...

Aplicatia consta în controlul unei macarale care trebuie sa realizeze cele 2 cicluri de miscare reprezentate în figura 5.1. Initial macaraua se...

1. Introducere Automatica este ansamblul metodelor şi mijloacelor de realizare a unor legături (corelaţii) intre diferite elemente şi instalaţii...

1. Numarul paginilor web existente este de ordinul a) Miilor b) Sutelor de milioane c) Milioanelor d) Miliardelor 2. Folosirea indecsilor web...

Partea I-a CONDUCEREA PROCESELOR DUPA MARIMEA DE IESIRE 1. Structuri de baza si metode de proiectare 1.1. Structuri de reglare si metode de...

Te-ar putea interesa și

1. Introducere Scopul principal al unei sere este de a îmbunătăți condițiile de mediu în care plantele sunt crescute. Serele permit o monitorizare...

OBIECTIVELE Proiectului Işi propune evidenţierea elementelor de bază ale proiectării subansamblurilor mecanice, utilizate la autovehicule rutiere....

1. SISTEMUL ELECTROENERGETIC Un ansamblu de echipamente electrice interconectate într-un spaţiu dat şi reprezentând un tot unitar, cu o...

Argument, Structural, un sistem hidraulic automat reprezintă o succesiune de conversii de energie. Motorul electric transformă energia electrică...

1.Consideratii generale privind simularea sistemelor dinamice. Un sistem dinamic liniar continuu, multivariabil, invariant în timp se poate modela...

Introducere Lucrarea urmareste sa faca o prezentare generala a regulatoarelor, sa ofere o clasificare a acestora si sa prezinte solutii...

Generalităţi Regulatorul automat are rolul de a prelua operaţional semnalul de eroare, (obţinut în urma comparaţiei liniar-aditive a mărimii de...

S1 Sistem = modelu fizic realizabil al unei structuri de elemente fizice la care singurele legături cu exteriorul sunt mărimile de cauză şi cele de...