
Extras din curs
1. Introducere în automatizarea proceselor
Automatizarea unui proces tehnologic înseamnă dotarea instalaţiilor cu mijloace tehnice necesare şi folosirea optimă a acestor mijloace pentru efectuarea automată a operaţiilor legate de conducerea procesului tehnologic. Principalele operaţii de automatizare dintr-o instalaţie chimică sunt următoarele:
- măsurarea şi/sau determinarea prin calcul a principalelor variabile ale procesului;
- semnalizarea depăşirii limitelor inferioară şi/sau superioară a anumitor variabile din proces;
- reglarea la o anumită valoare a uneia sau mai multor variabile de ieşire ale procesului;
- modificarea programată a unor variabile;
- menţinerea unor variabile sau funcţii de variabile la o valoare extremă;
- protecţia instalaţiei.
Automatizarea poate fi implementata în numeroase variante, în funcţie de natura procesului automatizat, de gradul de cunoaştere a acestuia, de mijloacele tehnice avute la dispoziţie, de gradul de pregătire a personalului de exploatare şi întreţinere.
În ceea ce priveşte reglarea clasică a proceselor se au în vedere următoarele tipuri de sisteme automate :
- sisteme de reglare cu acţiune după abatere;
- sisteme de reglarea cu acţiune după perturbaţie;
- sisteme de reglare combinată;
- Sisteme de reglare a raportului.
1.1. Sisteme de reglare cu acţiune după abatere
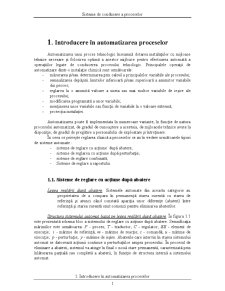
Legea reglării după abatere. Sistemele automate din aceasta categorie au proprietatea de a compara în permanenţă starea curentă cu starea de referinţă şi atunci când constată apariţia unor diferenţe (abateri) între referinţă şi starea curentă emit comenzi pentru eliminarea abaterilor. Structura sistemului automat bazat pe legea reglării după abatere. În figura 1.1 este prezentată schema bloc a sistemului de reglare cu acţiune după abatere. Semnificaţia mărimilor este următoarea: P - proces; T - traductor; C - regulator; EE - element de execuţie; i - mărime de referinţă; m - mărime de reacţie; c - comandă; u - mărime de execuţie; p - perturbaţie; y - mărime de ieşire. Abaterile care intervin în starea sistemului automat se datorează acţiunii continue a perturbaţiilor asupra procesului. În procesul de eliminare a abaterii, sistemul va atinge în final o nouă stare permanentă, caracterizată prin înlăturarea parţială sau completă a abaterii, în funcţie de structura internă a sistemului automat.
Sisteme de conducere a proceselor
Fig. 1.1. Schema bloc a sistemului automat bazat pe legea reglării după abatere.
Sistemele automate cu acţiune după abatere au implementate regulatoare ale căror algoritmi de reglare sunt relativ independenţi de sistem. Structural, un regulator cu acţiune după abatere prezintă un element comparator EC şi un bloc de calcul BC, figura 1.2.
Fig. 1.2. Structura regulatorului cu acţiune după abatere.
Algoritmul elementului comparativ este dat de relaţia =−=−="";"";inversKimdirectKmie , (1.1)
în care e reprezintă eroarea iar K reprezintă starea comutatorului “DIRECT/INVERS”.
Blocul de calcul BC elaborează comanda c după funcţia ()efc=. Dependent de structura funcţiei f, algoritmii de reglare pot fi liniari sau neliniari. Cei mai răspândiţi algoritmi de reglare sunt: algoritmul proporţional P, algoritmul proporţional - integrator PI şi algoritmul proporţional – integrator - derivator PID. Algoritmul proporţional este descris în forma analogică de relaţia eKccp+=0 , (1.2)
în care Kp reprezintă coeficientul de proporţionalitate (coeficientul de amplificare).
Sub forma discretă, algoritmul regulatorului P devine kpkeKcc+=0, (1.3)
unde k reprezintă momentul de timp la care se realizează eşantionarea, eroarea ek fiind kkkmie−= (“modul direct”). (1.4)
Sisteme de conducere a proceselor
Algoritmul proporţional-integrator are următoarea expresie analogică ∫++=tipdteTeKcc001, (1.5)
iar expresia discretizată are forma Σ=++=kjjikpkeTeKcc00τ (1.6)
unde τ reprezintă perioada de eşantionare.
Deoarece evaluarea sumei erorilor la fiecare iteraţie de calcul a comenzii ck necesită un efort deosebit, se propune utilizarea relaţiilor: ()eSTeKcckkikpk+++=−10τ; (1.7) kkkeSS+=−1 . (1.8)
Un aspect important în funcţionarea regulatoarelor industriale îl constituie saturarea comenzii, aceasta proprietate trebuind a fi transpusă şi regulatoarelor software. În acest scop se utilizează schema de saturare din figura 1.3, în care valoarea reacţiei, a prescrierii şi a comenzii este exprimata în %.
Preview document









































































































Conținut arhivă zip
- Sisteme de Conducere a Proceselor.pdf
Alții au mai descărcat și

CAPITOLUL 1. GENERALITĂŢI PRIVIND AUTOMATELE PROGRAMABILE 1.1.Definiţii şi caracteristici. Automatele programabile sau PLC-urile sunt...

Modulul SISTEME DE AUTOMATIZARE este destinat pregătirii elevilor din domeniul TEHNIC, nivel 3, (clasa a XI-a- liceu tehnologic şi clasa a XII-a...

Introducere Simularea evenimentelor discrete este o abordare foarte bună în ceea ce privește modelarea unui sistem real și pentru a-i reproduce...

Introducere Microsoft Access este o aplicaţie de management al bazelor de date pusă la dispoziţie de firma Microsoft prin suita Microsoft Office....

SCURT ISTORIC AL ROBOTICII Dezvoltarea istorica a stiintei si tehncii s-a produs in mai multe etape dupa cum urmeaza: Etapa “maşinismului",...

Definirea sistemului flexibil de prelucrare Sistemul flexibil de prelucrare SFP poate fi definit ca un ansamblu integrat de maşini-unelte...

I. Descrierea unei structuri de reglare automata Un sistem de reglare automata (SRA) are rolul de a realiza, la iesirea sa, o marime impusa prin...

Argument Proiectul cu tema “Concepţie de automatizare industrială modernă” este structurat în 5 capitole, fiecare capitol având subcapitolele...
Te-ar putea interesa și

1. Introducere În contextul situaþiei energetice mondiale, efortul cerut pentru reducerea consumurilor de energie în vederea conservãrii este, de...

Lotfi Zadeh a considerat necesitatea introducerii algoritmilor fuzzy deoarece a constatat: cu cat o problema este mai complexa, cu atat mai greu se...

Capitolul 1 TENDINŢE ŞI DEZVOLTĂRI ÎN CONDUCEREA AUTOMATĂ ŞI ADAPTIVĂ A MAŞINILOR UNELTE În timp s-au conturat mai multe direcţii importante în...

Cap.I ARGUMENT In aceasta lucrare am prezentat tema „Controlul proceselor tehnologice cu ajutorul calculatorului”. Aceasta este structurata in...

1. Tema proiectului În acest proiect ne-am propus să calculăm modelul matematic în doua situaŃii pentru conducte scurte respectiv conducte lungi...

1. INTRODUCERE 1.1. Introducere în contextul sistemelor de conducere Procesele automatizate de la care se pretind specificatii dorite ca...

I. Achiziția datelor şi conducerea proceselor cu computerul I.1 Generalități Utilizarea calculatoarelor numerice în industrie şi cercetare se...

ETAPA 1 (Prespecificatii) 1. Identificati elementele din schema si precizati ce reprezinta. In cadrul schemei am identificat urmatoarele...