
Extras din curs
Capitolul 1
Introducere
Prin automatizarea proceselor de producţie, se elimimă intervenţia directă a omului asupra acestora, omului revenindu-i în acest caz rolul de conducere generală.
Ansamblul de obiecte naturale care asigură conducerea unui proces tehnic sau de altă natură, fără intervenţia directă a omului reprezintă un echipament (sau dispozitv) de automatizare.
Procesul condus, supus automatizarii, impreună cu echipamentul de automatizare (de conducere), care asigură desfăşurarea procesului după anumite legi, poartă denumirea de sistem automat.
Spre exemplificare menţinerea constantă a temperaturii dintr-un cuptor electric , fără intervenţia directă a omului , presupune utilizarea unor dispozitive sau echipamente de automatizare care asigură măsurarea continua a temperaturii , prelucrarea erorii (diferenţei) dintre cele 2 valori şi comanda asupra tensiunii electrice de alimentare a cuptorului. Toate aceste dispozitive impreună cu cuptorul electric reprezintă un sistem automat.
Rezultă deci, că un sistem reprezintă “o colectie” de obiecte fizice convenabil aranjate şi cuplate funcţional.
În teoria sistemelor de reglare automată studiul obiectelor fizice şi al sistemelor, se realizează făcând abstracţie de natura lor fizică şi ţinând seama numai de mărimile ce caracterizează funţionarea lor şi de relaţiile existente între acestea.
Mărimile care nu depind de alte mărimi, sunt considerate ca “mărimi de intrare” , iar mărimile dependente de acestea sunt considerate “mărimi de ieşire” .
În acest fel teoria sistemelor înlocuieste de fapt elementele si sistemele reale(obiectele fizice) ,cu relaţii care imbracă diferite forme :
-ecuaţii şi sisteme de ecuaţii ;
-funcţii de transfer;
-mulţimi de perechi ordonate ale valorilor funţiilor vectoriale ale mărimilor de intrare şi ieşire;
-scheme bloc, etc;
Pornind de la definiţia sistemului automat , putem asocia acestuia un model structural alcătuit din două subsisteme (fig. 1.1):
-subsistemul condus S2 (procesul supus automatizării);
-subsistemul de condudere sau conducător S1 (echipamentul de automatizare);
a) b)
Fig 1.1
Structura de sistem automat din figura 1.1 este o structură deschisă , reprezentând totodată o structură minimală care asigură o relaţie funcţională între setul mărimilor de ieşire yi (i = 1, …,m) şi setul mărimilor de intrare ui (i = 1, …, n).
Pentru această structură , subsistemul S1 elaborează (generează) setul variabilelor mi (i = 1, …, p) in funcţie de ui astfel încât evoluţia subsistemului S2 să fie cea dorită.
Subsistemul condus poate fi reprezentat ca in figura 1.2 ,evidenţiindu-se următoarele mărimi caracteristice :
-m- vectorul mărimilor de intrare;
-y- vectorul mărimilor de ieşire;
-p- vectorul mărimilor perturbatoare;
a) b)
Fig 1.2
Pentru un proces monovariabil , care prezintă câte o mărime de intrare, ieşire si perturbaţie, modelul acestuia se reprezintă ca in fig. 1.2 b, iar pentru un proces multivariabil , care operează cu mai multe variabile de intrare, ieşire si de perturbaţii, modelul acestuia este preyentat in fig. 1.2a.
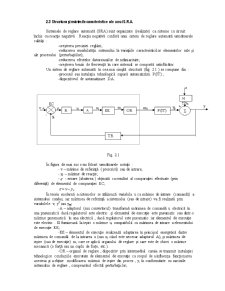
Dacă subsistemul de conducere S1 elaborează acţiunea de comandă atât funcţie de intrarea u cât şi funcţie de ieşirea y a subsistemului condus , se obţine o structură de sistem cu reacţie sau sistem închis . În fig.1.3 se reprezintă schema generală a unui sistem monovariabil (cu vectorii mărimilor de intrare , ieşire si reacţie având o singură componentă).
Fig. 1.3
În figura de mai sus subsistemul S3 are rolul de a transmite subsistemului S1 informaţii despre evoluţia ieşirii y1 cât şi de a realiza o adaptare sau conversie a acestui semnal astfel încât semnalul de ieşirea sa yr să fie de aceeaşi natură fizică şi să aibă acelaşi domeniu de variaţie cu semnalul u aplicat la intrarea subsistemului S1.
După modul cum subsistemul S1 face comparaţie intre mărimea de intrare u şi mărimea de reacţie yr există cazurile:
-dacă comparaţia se face prin diferenţă ,atunci sistemele închise sunt cu reacţie negativă şi se mai numesc sisteme de reglare automată;
-dacă comparaţia nu se face prin diferenţă ,ci prin însumare , atunci sistemele deschise sunt cu reacţie pozitivă sau sunt sisteme automate cu comparaţie „general strategică”.
Capitolul 2.
Sisteme de reglare automată
2.1 Definiţii, descriere
Un sistem de reglare automată reprezintă un sistem de conducere care are drept scop anularea diferenţei dintre mărimea impusă (referinţă) si mărimea de ieşire (reglată), indiferent de perturbaţiile care acţionează asupra sistemului. Acestei difernţe i se mai spune şi eroarea sau abaterea sistemului de reglare automată.
Se poate spune că sistemele de reglare automată asigură menţinerea automată în anumite limite a unor mărimi importante pentru buna desfăşurare a procesului tehnologic, pentru economisirea de energie, de materii prime sau pentru creşterea productivităţii.
Preview document



















































































Conținut arhivă zip
- Sisteme de Reglare Automata.doc
Alții au mai descărcat și

1. Argument Omul, ca fiinţă superioară, a fost preocupat din cele mai vechi timpuri de a cunoaşte şi stăpâni natura, de a dirija fenomene ale...

CAPITOLUL 1 SISTEME DE REGLARE AUTOMATĂ 1.1. Noțiuni introductive Sistemele de reglare automată (SRA) sau pe scurt, automatizarea, sunt des...

1. Ball and beam Sistemul „ball and beam” este unul dintre cele mai populare modele pentru lucrul in laborator in domeniul controlului de...

SCURT ISTORIC AL ROBOTICII Dezvoltarea istorica a stiintei si tehncii s-a produs in mai multe etape dupa cum urmeaza: Etapa “maşinismului",...

Argument Omul, ca fiinţă superioară, a fost preocupat din cele mai vechi timpuri de a cunoaşte şi stăpâni natura, de a dirija fenomene ale naturii...

I. Introducere O centrală termoelectrică, sau termocentrală este o centrală electrică care produce curent electric pe baza conversiei energiei...

Scurt istoric În procesul cunoasteri omul a fost preocupat din cele mai vechi timpuri, de a dirija fenomenele din natură , în sensul reducerii...

I. Descrierea unei structuri de reglare automata Un sistem de reglare automata (SRA) are rolul de a realiza, la iesirea sa, o marime impusa prin...
Te-ar putea interesa și
1. Argument Omul, ca fiinţă superioară, a fost preocupat din cele mai vechi timpuri de a cunoaşte şi stăpâni natura, de a dirija fenomene ale...

1.1 Generalitati Prin automatizarea proceselor de productie se urmareste eliminarea interventiei directe a omului în aceste procese, asigurându-se...
CAPITOLUL 1 SISTEME DE REGLARE AUTOMATĂ 1.1. Noțiuni introductive Sistemele de reglare automată (SRA) sau pe scurt, automatizarea, sunt des...

Capitolul I:TRADUCTOARE: I.1.Structura generală a unui traductor: În practică şi în tehnica automatizărilor,în vederea mărimilor fizice care...

Argument Automatica reprezintă totalitatea mijloacelor tehnice care permit neintervenţia omului in procesul de producţie. Este interesant de...

1.ARGUMENT Omul, ca fiinţă superioară, a fost preocupat din cele mai vechi timpuri de a cunoaşte şi stăpâni natura, de a dirija fenomene ale...

.Studiul elementului de întârziere de ordinul 1 1.1 Calculul răspunsului indicial prin rezolvarea ecuațiilor diferențiale T (dy(t))/dt +...

1.Consideratii generale privind simularea sistemelor dinamice. Un sistem dinamic liniar continuu, multivariabil, invariant în timp se poate modela...