
Extras din curs
Structură, dependenţe intrare-ieşire
Dispozitivele de măsurat electromecanice (DMEM) sunt elementul constructiv esenţial al oricărui aparat electric de măsurat.
Constructiv un DMEM este compus dintr-un echipament fix şi altul mobil, ultimul putând executa faţă de primul doar deplasări unghiulare.
Poziţia relativă intre cele două componente este descrisă printr-o mărime de ieşire unică, M, de tip deplasare unghiulară, pusă în evidenţă prin intermediul unui sistem analogic de afişare de tip scară + indicator. Mărimea de intrare este reprezentată de un ansamblu My de 1…3 mărimi electrice active de tip curent sau tensiune.
Funcţional la nivelul unui DMEM se asigură conversia energiei electrice absorbită prin mărimea de intrare My în energie mecanică utilizată pentru deplasarea echipamentului mobil; modalităţile concrete de realizare a acestei conversii, ce individualizează tipul de DMEM, asigură prin dependenţele M(My) implementate , posibilitatea efectuării tuturor măsurătorilor electrice uzuale ( mărimi de tip intensitate, putere sau de tip parametric).
Principalele tipuri de DMEM sunt: magnetoelectric (DME), feromagnetic (DFM), electrodinamic (DED), ferodinamic (DFD), electrostatic (DEL), de inducţie (DIN).
Aparatele electrice de măsurat (indicatoare sau înregistratoare) realizate cu DMEM sunt: ampermetre şi voltmetre pentru c.c. şi c.a. (cu DME,DFE, DED, DEL); wattmetre pentru c.c. şi c.a. şi varmetre (cu DED, DFE); contoare de energie pentru c.a. (cu DIN); ohmmetre (cu DME); capacimetre, cosfimetre (cu DED, DFE).
Dependenţe funcţionale pentru regimul static al DMEM
În regim static asupra echipamentului mobil al unui DMEM acţionează făcând echilibrul, două cupluri: cuplul activ (motor) şi cuplul rezistent (antagonist).
Cuplul activ, Ma, este controlat de una sau mai multe din componentele mărimii de intrare My, printr-o lege dependentă de tipul constructiv al DMEM. El este creat de mărimea de măsurat.
Cuplul rezistent sau antagonist, M, este întotdeauna dependent de şi opus ca sens de acţiune lui Ma. Se folosesc două modalităţi de realizare a cuplului rezistent: mecanică (cu arcuri spirale, cu fire sau benzi de suspensie sau de torsiune) şi electrică (prin tehnici similare celor folosite pentru cuplul activ). Variantele de DMEM care folosesc cuplul antagonist mecanic (întotdeauna de forma M = -D) se numesc variante normale, iar cele care folosesc cuplul antagonist electric se numesc variante logometrice (sau măsurătoare de raport).
Sub acţiunea cuplului activ Ma şi a cuplului rezistent sau antagonist M, echipajul mobil se roteşte cu unghiul pentru care este satisfăcută egalitatea:
Ma + M = 0
Dependenţe funcţionale pentru regimul dinamic al DMEM
Analizând regimul tranzitoriu de mişcare a echipajului mobil se constată că acesta este prin excelenţă un element de ordinul doi căruia îi corespunde o ecuaţie diferenţială de forma:
unde J este momentul de inerţie al echipajului mobil în raport cu axa sa de rotaţie, iar Mi sunt cuplurile care acţionează asupra acestuia.
În afară de cuplul activ şi antagonist, asupra echipajului mobil este necesar să mai acţioneze un cuplu numit de amortizare, proporţional cu viteza de rotaţie a echipajului mobil, prin intermediul factorului de amortizare A.
Dacă nu ar exista acest cuplu, nu s-ar putea obţine regimul staţionar.
În felul acesta ecuaţia diferenţială completă pentru regimul tranzitoriu este:
Soluţiile acestei ecuaţii descriu caracterul mişcării echipajului mobil. Acest caracter periodic sau aperiodic depinde de gradul de amortizare .
unde este pulsaţia oscilaţiilor libere (în lipsa amortizării A=0).
După cum se ştie, durata procesului tranzitoriu este minimă în cazul în care gradul de amortizare este egal cu unu. Aceasta se realizează prin alegerea potrivită a factorului de amortizare A cu ajutorul dispozitivelor de amortizare.
Dintre regimurile dinamice posibile ale DMEM două sunt cele de interes: răspunsul la intrare treaptă unitate şi regimul dinamic stabilizat pentru intrare de tip periodic.
Influenţa frecării asupra indicaţiei dispozitivelor indicatoare
În afară de cuplurile care acţionează asupra echipajului mobil la dispozitivele indicatoare la care echipajul mobil este fixat pe un ax ce se roteşte în lagăre, mai apare un cuplu datorat frecărilor. Prezenţa cuplului de frecare Mf şi în repaus face ca deviaţia permanentă a echipajului mobil să se modifice şi condiţia de echilibru să devină:
M + M Mf = 0
Semnul cuplului de frecare este determinat de sensul de mişcare înainte de oprire, frecarea opunându-se întotdeauna mişcării.
Cuplul de frecare este proporţional cu masa G a echipajului mobil la puterea 1,5
Mf =cf G1,5
unde constanta de proporţionalitate cf depinde de calitatea lagărelor. Pentru a micşora acest coeficient, lagărele dispozitivelor indicatoare se confecţionează din pietre dure (agat, safir, rubin), ca la ceasornice.
Ecuaţia echilibrului cuplurilor în regim dinamic este:
Ma + M + Mj + Mp Mf = 0
deoarece, de obicei valoarea cuplului de frecare este redusă, acţiunea sa se neglijează.
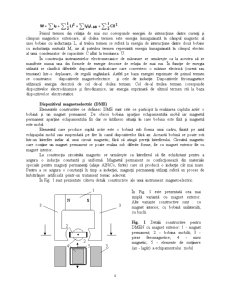
Producerea cuplurilor şi dispozitive specifice
Cuplul rezistent sau antagonist se realizează în cele mai multe cazuri pe cale mecanică prin resoarte spirale şi în unele cazuri prin benzi de torsiune. Resoartele spirale sunt benzi elastice în formă de spirală fixate la un capăt de axul dispozitivului, iar la celălalt capăt de carcasă. Atât resoartele spirale cât şi firele de suspensie trebuie să fie elastice şi nemagnetice. Se confecţionează din aliaje de bronz cu fosfor sau cu beriliu. Cuplul antagonist specific D este determinat de dimensiunile geometrice ale resortului sau firului şi de modulul de elasticitate al materialului.
Preview document








Conținut arhivă zip
- Traductoare de Marimi Electrice - Dispozitive de Masurat Electromecanice.doc
Alții au mai descărcat și

Introducere Microsoft Access este o aplicaţie de management al bazelor de date pusă la dispoziţie de firma Microsoft prin suita Microsoft Office....

Laborator 1 UML – Unified Modeling Language Diagrama cazurilor de utilizare (Use Case Diagram) Introducere UML este un limbaj de modelare bazat...


Manipulatorul este sistemul mecanic automat a carui comanda se bazeaza pe sisteme rigide care presupun o interventie in structura fizica a...

1. ELEMENTE GENERALE 1.1 Definiţii. Elemente constructive Maşina electrică este un sistem de circuite electrice plasate pe miezuri magnetice în...

Curs 1 Introducere Abordarea structurală a sistemelor de proiectare pentru procese complexe cum sunt comanda numerică cu calculatorul (CNC) a...


caracterizarea noţiunii de informaţie, reprezentarea şi prelucrarea acesteia în sistemele tehnice; - obţinerea prin rafinări succesive a unui...
Te-ar putea interesa și

Capitolul I Necesitatea si eficienta compensarii puterii reactive 1.1. Compensarea puterii reactive Reducerea circulaţiei de putere prin...

INTRODUCERE LOCUL SI ROLUL ÎNCERCĂRILOR ÎN STUDIUL ORGANELOR DE MAŞINI Necesitatea încercării organelor de maşini, precum şi a construcţiilor...

Cap. 3. Traductoare 3.1. Senzorul Definiţie: Se mai numeşte captor şi este un element al unui aparat de măsură sau al unui lanţ de măsurare care...

1. Tema de proiect 1.1. Proiectarea unui sistem de reglare automată de reglarea turaţiei unui motor de curent continuu utilizând regulatoare...

1. Studiul literaturii de specialitate 1.1. Clasificarea senzorilor Traductorul este un dispozitiv capabil să convertească energia dintr-o formă...

Expresia “dezvoltare durabilă” (Sustainable Development) a fost folosită în anul 1987 în Raportul Comisiei Mondiale cu privire la Mediu şi...


1. Specificitatea măsurărilor în biomedicină şi ecologie 1.1.Procesul de măsurare “Când puteţi măsura un fenomen şi îl exprimaţi prin numere,...