Extras din curs
Capitolul 1: microcontroler PIC16F887 - Dispozitiv de ansamblu asupra
PIC16F887 este una dintre cele mai noi produse de Microchip. Conţine toate componentele care au actualizat în mod normal, microcontrolere. Pentru sale de pret scazut, gama larga de aplicare, de înaltă calitate şi uşor de disponibilitate, aceasta este o soluţie ideală în aplicaţii cum ar fi: de control a diferitelor procese în industrie, masina de dispozitiv de control, de măsurare a diferitelor valori etc Unele dintre principalele sale caracteristici sunt enumerate dedesubt.
- RISC, arhitectura
- Doar 35 pentru a afla instrucţiunile de
- Toate singur ciclu de instrucţiuni cu excepţia sucursalelor
- Frecvenţa de 0-20 MHz
- Oscilatorul intern de precizie
- Fabrica de calibrat
- Produse de plastic selectabilă de frecvenţă largă de 8MHz la 31KHz
- De putere de tensiune de alimentare 2,0-5.5V
- Consum: 220uA (2.0V, 4MHz), 11uA (2,0 V, 32 kHz) 50nA (stand-by mode)
- Power-Saving modul sleep
- Brown-out Reset (BOR), cu opţiune de software de control
- 35 intrare / ieşire-pin
- Sursă de curent de inalta / chiuveta cu led-uri directe pentru unitate
- software şi individual programabil trage în sus Rezistor
- Întreruperea-pe-Schimbare de aderenţă
- 8k ROM de memorie în tehnologia FLASH
- Chip poate fi reprogrammed pana la 100,000 de ori
- In-Circuit Serial Programming Opţiunea
- Chip poate fi programat chiar încorporat în dispozitivul ţintă
- 256 octeţi de memorie EEPROM
- Datele pot fi scrise mai mult de 1.000.000 de ori
- 368 octeţi de memorie RAM
- Convertor A / D:
- 14-canale
- 10-bit Rezoluţie
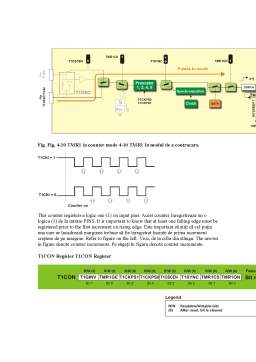
- 3 independente de timp / contoare
- Watch-dog timer
- Comparaţie cu modul analogic
- Două comparator analogic
- Fixă de referinţă de tensiune (0.6V)
- Programabile on-chip de tensiune de referinţă
- PWM de ieşire direcţiei de control
- Enhanced modul USART
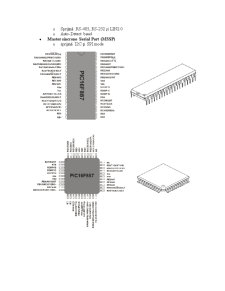
- Sprijină RS-485, RS-232 şi LIN2.0
- Auto-Detect baud
- Master sincrone Serial Port (MSSP)
- sprijină I2C şi SPI mode
PIN Descriere
După cum se vede în imaginea de mai sus, cea mai sunt multi-pin-funcţional. De exemplu, calculatoare RA3/AN3/Vref + / C1IN + pentru cea de-a cincea de aderenţă specifică următoarele funcţii:
- RA3 Port A treia digitale de intrare / ieşire
- În al treilea rând AN3 analogic de intrare
- Vref + pozitive de tensiune de referinţă
- C1IN + comparator C1positive intrare
Acest mic truc este folosit adesea pentru că face mai multe microprocesoare pachet compact, fără a afecta funcţionalitatea. Aceste diverse funcţii de aderenţă nu pot fi utilizate simultan, dar poate fi modificat în orice moment în timpul operaţiunii.
În următoarele tabele, toate pin 'se referă la numerele de PDIP 40 microcontroler
Preview document

























































































































































































Conținut arhivă zip
- Microcontrolere PIC
- Capitolul 1.doc
- Capitolul 2.doc
- Capitolul 3.doc
- Capitolul 4.doc
- Capitolul 5.doc
- Capitolul 6.doc
- Capitolul 7.doc
- Capitolul 8.doc
- Capitolul 9.doc
Alții au mai descărcat și

1.Descriere generală LPC 1759/58/56/54/52/51 sunt microcontrolere de bază ARM Cortex-M3 pentru aplicații încorporate ce dispun de un nivel mare de...

1 Caractere generele 1.1 Definiţie Porţile logice sunt circuite electronice capabile să efectueze operaţii logice simple sau compuse cu semnalele...

INTRODUCERE CE ESTE UN MICROCONTROLLER? - UN CALCULATOR, DEOARECE: TOATE CALCULATOARELE AU O UNITATE CENTRALA DE PROCESARE (CPU) TOATE...


Biblioteca de Sabloane Standard (STL) asigura o abstractizare standardizata a datelor prin intermediul containerelor si o abstractizare procedurala...

1. Clase derivate. Prin mostenire, atributele unei clase de baza sunt transmise unor clase derivate. Derivarea permite definirea unor clase noi,...

Clase pentru miniaplicatii Miniaplicatiile constituie extensii ale unei clase deja existente java.applet.Applet. Structura clasei unui applet...

Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

Introducere Maşina de curent continuu este maşina electrică la care schimbul principal de energie cu o reţea se face în curent continuu. Se...

CAPITOLUL 1 Sisteme de reglare pentru acţionări electrice 1.1 Sisteme cu buclă deschisă şi bucla închisă Sistemele de control, în general, pot...

INTRODUCERE. Este bine cunoscut cã, dintre toate mijloacele de transport, transportul naval deţine ponderea cea mai mare atât datoritã faptului cã...

INTRODUCERE Funcţionarea transportului urban de călători este o problemă vitală pentru dezvoltarea economiilor urbane. Oraşele există deoarece ele...

CAPITOLUL 1 PROIECTAREA SISTEMELOR DE REGLARE A DEBITELOR 1.1 Noţiuni introductive Reglarea debitului pare la prima vedere o problemă extrem de...

1. Introducere Circumstanţele în care ne găsim astăzi în domeniul microcontrolerelor şi-au avut începuturile în dezvoltarea tehnologiei...

CAPITOLUL I INTRODUCERE 1.1. Ce este un robot? Cuvântul robot provine din limba cehă (robota) şi înseamnă muncitor sau rob. O definiţie simplă a...