
Extras din curs
CAPITOLUL I
ELEMENTE DE MECANICĂ CLASICĂ
1.1. Cinematica punctului material
Punctul material reprezintă un corp cu dimensiuni neglijabile. Posibilitatea neglijării dimensiunii corpului depinde de condiţiile concrete ale diferitelor probleme studiate. Un corp se află în mişcare atunci când îşi modifică poziţia faţă de alte corpuri considerate fixe şi este în repaus când nu-şi modifică poziţia faţă de acestea. Un corp oarecare, fix, faţă de care se raportează mişcarea altor corpuri constituie un sistem de referinţă (SR).
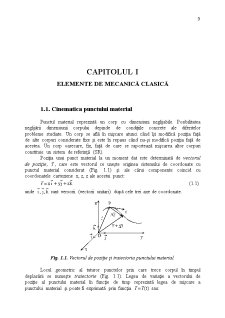
Poziţia unui punct material la un moment dat este determinată de vectorul de poziţie, , care este vectorul ce uneşte originea sistemului de coordonate cu punctul material considerat (Fig. 1.1) şi ale cărui componente coincid cu coordonatele carteziene x, z, z ale acestui punct:
(1.1)
unde sunt versorii (vectorii unitari) după cele trei axe de coordonate.
Fig. 1.1. Vectorul de poziţie şi traiectoria punctului material.
Locul geometric al tuturor punctelor prin care trece corpul în timpul deplasării se numeşte traiectorie (Fig. 1.1). Legea de variaţie a vectorului de poziţie al punctului material în funcţie de timp reprezintă legea de mişcare a punctului material şi poate fi exprimată prin funcţia sau:
(1.2)
În fiecare punct al traiectoriei se poate defini un vector, , numit viteză şi este definit ca variaţia în timp a vectorului de poziţie şi tangent la traiectorie (Fig. 1.1):
(1.3)
sau pe componente:
(1.4)
Modulul vectorului vitezei va fi:
(1.5)
Dacă viteza punctului material variază în timp se defineşte vectorul acceleraţie (Fig. 1.2):
(1.6)
sau pe componente:
(1.7)
Modulul vectorului acceleraţie este dat de relaţia:
(1.8)
Pentru un punct material care parcurge o traiectorie curbilinie oarecare se pot defini două componente ale acceleraţiei: acceleraţia tangenţială, şi acceleraţia normală .
Dacă versorul vitezei este , atunci (Fig. 1.2), iar acceleraţia tangenţială are expresia:
(1.9)
ea fiind determinată de variaţia în modul a vitezei şi are direcţia tangentă la traiectorie.
Acceleraţia normală este determinată de variaţia vitezei ca direcţie ţi are direcţia normală la traiectorie în orice punct. Dacă se notează cu versorul normalei la traiectorie (Fig. 1.2), atunci acceleraţia normală este dată de relaţia:
(1.10)
Acceleraţia poate fi acum exprimată prin relaţia:
(1.11)
care are modulul
(1.12)
Fig. 1.2. Componentele acceleraţiei punctului material.
Se pot considera câteva cazuri particulare:
a) Mişcarea rectilinie pentru care raza traiectoriei este infinită (r). Deci =0 şi .
Dacă , mişcarea se numeşte uniform variată şi prin integrarea relaţiei (1.6), se obţine legea vitezei:
(1.13)
după care prin integrarea relaţiei (1.3) se obţine legea de mişcare:
(1.14)
b) Mişcarea circulară are loc pe o traiectorie pentru care raza este constantă r=const (Fig. 1.3).
Dacă la momentul t punctul material se găseşte în punctul P iar la momentul t+dt se găseşte în punctul P1, atunci deplasarea, dr, a corpului va fi:
(1.15)
iar viteza este dată de relaţia:
(1.16)
unde se numeşte viteza unghiulară şi este dată de:
(1.17)
Fig. 1.3. Mişcarea circulară.
Acceleraţia tangenţială are modulul egal cu:
(1.18)
unde
(1.19)
se numeşte acceleraţia unghiulară.
Modulul acceleraţiei normale se obţine din relaţia (1.10) în care se ţine seama de relaţia (1.16):
(1.20)
iar acceleraţia totală va avea modulul:
(1.21)
Având în vedere direcţiile şi sensurile acestor mărimi (Fig. 1.4), unde viteza unghiulară este un vector perpendicular pe planul traiectoriei circulare şi are sensul dat de înaintarea burghiului drept care se roteşte în sensul vitezei , se pot scrie următoarele relaţii vectoriale:
(1.22)
(1.23)
(1.24)
Fig. 1.4. Sensul vitezei şi acceleraţiei unghiulare
Preview document












































































































































































































































































































































Conținut arhivă zip
- bCuprins.doc
- Capitolul I.doc
- Capitolul II .doc
- Capitolul III .doc
- Capitolul IV.doc
- Capitolul V.doc
- Capitolul VI.doc
- Capitolul VII.doc
- Capitolul VIII.doc
- Capitolul zIX.doc
- Capitolul zX.doc
- Capitolul zXI.doc
- Capitolul zXII.doc
- LABORATOR 1.doc
- LABORATOR 2.doc
- LABORATOR 3.doc
- LABORATOR 4.doc
- LABORATOR 5.doc
- tce2.doc
Alții au mai descărcat și

INTRODUCERE Snubber-ele reprezinta o parte importanta a electronicii de putere.Ele reprezinta mici retele ale partilor din circuitelor de...

~ CAPITOLUL 1 ~Procedura de testare In primul rând se face un test funcţional in care pune in evidenţă comportarea plăcii şi se incearcă o...

Jonctiunea p-n la echilibru termic. În practica se utilizeaza numeroase dispozitive electronice obtinute prin alaturarea de regiuni...

Vibratiile sunt fenomene dinamice care iau nastere în medii elastice sau cvasielastice, datorita unei excitatii locale, care se manifesta prin...

Notiuni fundamentale : Viteza, prin definitie, este o marime vectoriala. Daca directia (suportul) de deplasare a corpului în miscare este data,...

Elemente sensibile pneumatice pentru controlul dimensional Controlul dimensional este un domeniu în care utilizarea dispozitivelor pneumatice...

9.2.2 Tipuri de marci tensometrice si caracteristicile acestora Principalele caracteristici ale MT sunt determinate de natura materialului din...

c) Transformatoare de curent. În practica aceste transformatoare se mai nu-mesc “reductoare de curent”si sunt folosite pentru prelucrarea...
Te-ar putea interesa și

CAPITOLUL I. Fundamentări teoretice ale temei 1. Fotbalul- ramură a sportului de performanţă Nu cred că există cineva născut să fie jucător de...

INTRODUCERE Societatea în care trăim s-a dezvoltat cu paşi uriaşi în ultimul secol. Aceşti paşi progresivi care au evoluat toate împrejurările cu...

MOTTO: „Sănătatea este o comoară pe care puţini ştiu să o preţuiască, deşi aproape toţi se nasc cu ea” Hipocrate MOTIVAȚIE Sistemul nervos...

INTRODUCERE Operaţiunile bancare au apărut şi s-au dezvoltat din cele mai vechi timpuri, o dată cu apariţia banilor şi dezvoltarea vieţii sociale...

Capitolul 1. Organizarea și funcționarea Liceului de Informatică “Grigore C. Moisil” Iași 1.1. Scurt istoric Informatica a început să joace un...

Întroducere Banca zilelor noastre nu mai este o simplă bancă de depozit şi credit, ea devenind o “bancă financiară” la dispoziţia clienţilor....

Pachet de lucru nr.1 Analiza stadiului actual Definire: Acest pachet de lucru are în vedere cunoaşterea stadiului actual al programelor de...

0. Prefata - Introducere "Nu am nici o îndoiala ca în realitate viitorul va fi într-o masura enorma mai surprinzator decât orice îmi pot imagina....