
Cuprins
- capitolul 1. Navigare. Generalităţi. Procedee şi sisteme de navigaţie 1
- 1.1. Navigare. Generalităţi 1
- 1.2. Sisteme geodezice de referinţă 1
- 1.3. Sisteme de radionavigaţie 3
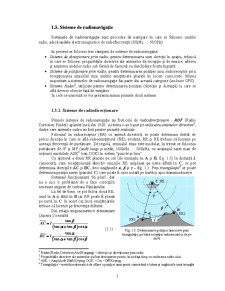
- 1.3.1. Sisteme de radiodirecţionare 3
- 1.3.2. Sisteme de radionavigaţie hiperbolice fără sateliţi 5
- 1.3.2.1. Principiile radionavigaţiei hiperbolice 5
- 1.3.2.2. Principalele sisteme de radionavigaţie hiperbolică fără sateliţi 6
- 1.3.2.3. Sisteme de radionavigaţie hiperbolică terestre 6
- a. Sistemul Sonne/CONSOL 6
- b. Sistemul GEE 7
- c. Sistemul LORAN 8
- capitolul 2. Principiile de funcţionare ale sistemului global de poziţionare (GPS) 12
- 2.1. Introducere 12
- 2.2. Structura GPS 14
- 2.3. Principiile de poziţionare prin GPS 15
- 2.3.1. Principiul trilateraţiei în spaţiu 15
- 2.3.2. Poziţionarea absolută prin GPS 16
- 2.3.3. Erori în determinarea poziţiei prin GPS 19
- 2.3.4. Poziţionarea diferenţială prin GPS (GPS diferenţial) 21
- capitolul 3. Semnalele utilizate de sateliţii GPS 23
- 3.1. Introducere 23
- 3.2. Mesajul de navigaţie (fluxul de date cu 50 bps) 25
- 3.3. Codul de achiziţie grosieră (C/A Code – Coarse Aquisition Code) 27
- 3.3.1. Principile tehnicii spread spectrum 27
- 3.3.2. Funcţiile codului C/A 29
- 3.3. Codul de achiziţie precisă (P Code – Precise Code) 30
- Bibliografie 34
Extras din curs
Navigare. Generalităţi. Procedee şi sisteme de navigaţie
1.1. Navigare. Generalităţi
Navigarea este ştiinţa conducerii unui vehicul prin determinarea poziţiei, traseului şi
distanţei parcurse, astfel încât să ajungă dintr-un punct în altul în condiţii de siguranţă şi
eficienţă, pe drumul prevăzut1.
Elementul esenţial al navigării este determinarea poziţiei vehiculului.
Navigarea prin obsevarea mediului – relief, localităţi, clădiri etc. (pe uscat), linia
ţarmului, faruri, balize, … (pe apă), este cel mai simplu procedeu de navigare; se folosesc şi
hărţi cu astfel de repere specificate. Evident, procedeul nu este potrivit pentru călătorii pe
distanţe foarte mari, mai ales pe mări şi oceane, unde reperele lipsesc.
Pentru navigarea pe mări s-au folosit – şi încă se folosesc, alte procedee de navigare
precum:
Navigarea celestă, în care poziţia se stabileşte prin observarea soarelui, lunii, anumitor
stele sau planete. Practic, se măsoară înălţimea (unghiul faţă de orizont) a cel puţin două repere
celeste şi se trasează cercurile “de egală înălţime” 2 – la intersecţia (încrucişarea) acestora
se află operatorul.
Navigarea prin estimare sau poziţionarea deductivă (Dead Reckoning) este un procedeu
în care se stabileşte direcţia – cu o busolă, observând o stea, …, se măsoară timpul şi se
estimează viteza deplasării din care se calculează distanţa parcursă – astfel se aproximează
poziţia vehiculului.
De regulă se utilizează cel puţin două procedee, determinând astfel o zonă – uzual triunghiulară,
în care se află, cu mare probabilitate, vehiculul.
Cele trei procedee de mai sus au fost, mii de ani, singurele folosite – până la dezvoltarea
electronicii şi radiocomunicaţiilor, în timpul şi după al doilea război mondial (după 1940).
In ultimii 60 de ani s-au dezvoltat multe procedee de navigare electronică:
- radionavigaţia, în care se folosesc unde radio; cel mai perfecţionat sistem este GPS, cu
sateliţi;
- sistemele de navigaţie inerţială – cu giroscoape, accelerometre şi vitezometre;
- sistemele Radar folosite în principal pentru evitarea coliziunilor dar şi pentru determinarea
distanţelor şi a poziţiei.
Sistemele electronice, mai ales cele de radionavigaţie, au marele avantaj al independenţei
faţă de vreme, de condiţiile de vizibilitate, la care se adaugă precizia net superioară faţă
de celelalte procedee de navigare.
1.2. Sisteme geodezice de referinţă
Poziţia unui punct în spaţiu se stabileşte într-un sistem de coordonate spaţiale, care pot
fi: carteziene (Oxyz), cilindrice, sferice, elipsoidale etc.
O primă şi esenţială problemă în navigare constă în adoptarea unui sistem de coordonate
potrivit pentru fizarea poziţiei punctelor pe Pământ, având în vedere că planeta noastră
este un corp neregulat, cu formă complicată şi contur variabil (altitudinea suprafeţei variază în
1 Enciclopaedia Brittanica, 2004.
2 Locul geometric al punctelor de pe Pământ din care o stea se vede sub aceeaşi înclinaţie este un cerc.
2
limite largi). Sistemele de referinţă ataşate Pământului pentru poziţionarea punctelor se
numesc sisteme (de referinţă) geodezice (Geodetic System).
Până în urmă cu circa 60 de ani, se foloseau sisteme geodezice la nivel de ţară sau
continent; pentru mări şi oceane se foloseau sisteme acceptate de mai multe ţări. Odată cu
“mondializarea” sistemelor de navigaţie electronică, a devenit imperios necesară adoptarea
unui sistem unic, unanim acceptat şi suficient de precis, care să permită poziţionarea unui
punct cu bună precizie. Astfel, au apărut sitemele geodezice mondiale (World Geodetic
System – WGS) care s-au perfecţionat mereu. In prezent se foloseşte WGS-84 elaborat în
SUA (1984), după mai multe variante militare şi civile (WGS 60, 66, 72, …).
In principiu, în WGS-84 Pământul ideal este considerat un elipsoid – fig. 1.1, iar
sistemul de referinţă este cartezian cu:
- originea (O) în centrul de masă al Pământului;
- Planul Oxy în planul ecuatorial;
- axa Ox trece prin origine şi intersecţia meridianului Geenwich (zero) cu ecuatorul;
- axa Oz trece prin polul nord;
- axa Oy este perpendiculară pe planul Oxz.
Preview document

































Conținut arhivă zip
- Principiile Sistemelor de Radionavigatie.pdf
Alții au mai descărcat și

Sistemul de propulsie Sistemul de propulsie este alcatuit din: I Fluidul de propulsie - reprezinta subsistemul asupra caruia actioneaza...


Mecanica Masinilor Aeriene - Ecuatiile miscării aeronavelor - Consideratii introductive - Aeronava – solid rigid - 6 grade de libertate -...

ELICOPTERE CURS 1 INTRODUCERE Scurt istoric Scurt istoric Scurt istoric Tipuri constructive de elicoptere Monorotor cu elice anticuplu...

3 . Compresorul aerodinamic, axial Compresorul axial face parte din categoria compresoarelor cinetice la care comprimarea statica a fluidului...
Forţă auxiliară care să suplinească lipsa de portanţă la viteze mici: Aerodinamică: elici rabatabile ventilatoare montate în aripă sau fuselaj...

Este o metodă numerică îmbunăţită pentru calculul distribu]iei încărcării pe o aripă oscilantă. Aripa este trapezoidală, cu săgeată şi se află în...

Apariţia elicilor aeriene este legată de motoarele cu piston. Încă din perioada primelor zboruri, până în anii ’50, acest tip de motor a fost...
Te-ar putea interesa și

1 INTRODUCERE 1.1 Generalităţi Încercarea de a-şi imagima unde se află şi încotro merge a fost una din cele mai vechi pasiuni ale omului. Peste...

CAPITOLUL I SURSE DE SEMNAL Comunicaţiile au un spectru extrem de larg, semnalele transmise prin sistemele de comunicaţii reprezentând...
