
Cuprins
- CUPRINS
- 1. GENERALITATI INTRODUCTIVE 5
- 1.1. Actionarea pneumatica 5
- 1.2. Aerul ca agent de lucru 6
- 1.3. Aerul atmosferic 8
- 1.4. Legile gazelor perfecte aplicabile sistemelor pneumatice 12
- 1.5. Elemente teoretice de bază necesare proiectării instalaţiilor pneumatice 15
- 1.5.1. Sisteme de unităţi de măsură 15
- 1.5.2. Definirea presiunilor 20
- 1.5.3. Definirea coeficientilor 21
- 1.5.4. Debitul la "6 bar" 21
- 1.5.5. Calculul debitului pe baza de formule 22
- 1.5.6. Calculul debitului necesar pe bază de diagrame 22
- 2. COMPRESOARE 24
- 2.1. Generalitati 24
- 2.2. Constructia si functionarea compresoarelor 24
- 2.2.1. Compresoare cu pistoane 24
- 2.2.2. Compresoare cu suruburi 26
- 2.2.3. Compresoare cu lobi 27
- 2.2.4. Compresoare cu palete 28
- 2.2.5. Compresoare cu rotoare spiralate 28
- 3. MOTOARE PNEUMATICE 30
- 3.1. Motoare pneumatice liniare. Cilindrii pneumatici 30
- 3.2. Motoare pneumatice oscilante 44
- 3.3. Motoare pneumatice combinate 46
- 3.4. Motoare pneumatice rotative 47
- 3.5. Maini mecanice 50
- 3.6. Module pneumatice pentru manipulatoare si roboti 52
- 3.7. Calculul motoarelor pneumatice 57
- 4. APARATURA PNEUMATICA 64
- 4.1. Prepararea aerului industrial 64
- 4.1.1. Filtre 65
- 4.1.2. Dispozitive de purjare 68
- 4.1.3. Uscatoare de aer 70
- 4.1.4. Racitoare de aer 70
- 4.1.5. Regulatoare de presiune 71
- 4.1.6. Ungatoare 75
- 4.2. Aparatura de distributie pneumatica. Distribuitoare 78
- 4.2.1. Criterii de alegere a distribuitoarelor 78
- 4.2.2. Constructia distribuitoarelor 81
- 4.2.3. Distribuitoare pneumatice realizate de diverse firme 84
- 4.2.4. Alte aparate de distributie a aerului 97
- 4.2.5. Dimensionarea distribuitoarelor 99
- 4.3. Aparatura pneumatica proportionala si servo 103
- 4.4. Amplificatoare pneumohidraulice 107
- 4.5. Elemente pentru realizarea vidului 108
- 4.6. Elemente pneumatice auxiliare 112
- 4.6.1. Supape de sens 112
- 4.6.2. Drosele de cale 113
- 4.6.3. Supape selectoare 114
- 4.6.4. Supape de descarcare rapida 114
- 4.6.5. Amortizoare de zgomot 115
- 4.6.6. Relee de presiune 116
- 4.6.7. Sesizoare de presiune 117
- 4.7. Elemente de logica pneumatica 118
- 4.8. Elemente de transport si de legatura 122
- 4.8.1. Dimensionarea conductelor 122
- 4.8.2. Tipuri de conducte si racorduri utilizate pentru actionarile pneumatice 125
- 5. SISTEME PNEUMATICE ELEMENTARE 132
- 5.1. Reguli de bază pentru întocmirea schemelor pneumatice 132
- 5.2. Cicluri de lucru în sistemele pneumatice 141
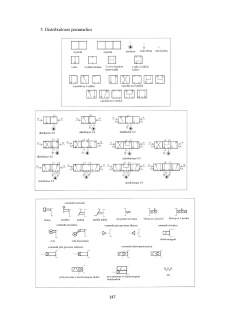
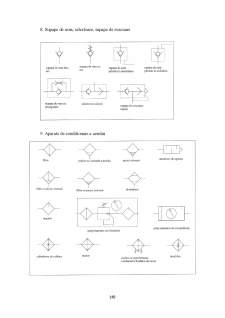
- Anexa. Simboluri pentru componente pneumatice 145
- Bibliografie 151
Extras din curs
1 GENERALITĂŢI INTRODUCTIVE
1.1. Acţionarea pneumatică
Existenţa staţiilor centrale de compresoare şi a reţelelor de aer comprimat în uzinele constructoare de maşini, în industria textilă şi de pielărie, în industria chimică şi alimentară, aproape în orice fabrică sau atelier, creează condiţii pentru proiectarea şi construcţia de dispozitive pneumatice, moderne, de mare productivitate.
Principalele avantaje ale acţionării pneumatice, care au condus la o extindere considerabilă a dispozitivelor pneumatice, sunt:
- creşterea productivităţii muncii prin reducerea timpilor auxiliari necesari la strângerea şi desfacerea semifabricatelor. În comparaţie cu acţionarea manuală se pot reduce timpii de strângere – desfacere de 5 – 10 ori;
- reducerea efortului depus de muncitor în procesul strângerii – desfacerii semifabricatelor. Dacă la mecanismele de strângere manuale forţa aplicată de muncitor este de 147 – 196 N (15 – 20 kgf) şi uneori chiar mai mare, pentru comanda dispozitivelor pneumatice este suficientă o forţă de numai 9,81 – 14,7 N (1 – 1,5 kgf);
- realizarea de forţe constante pentru strângere, a căror valoare poate fi uşor controlată în tot timpul prelucrării;
- determinarea cu suficientă precizie a valorii forţelor de strângere şi menţinerea constantă a acestora creează condiţii şi pentru prelucrarea de semifabricate cu pereţi subţiri, uşor deformabile, fără pericolul distrugerii lor în timpul strângerii;
- indiferent dacă are loc strângerea unui semifabricat în mai multe puncte sau strângerea mai multor semifabricate în acelaşi dispozitiv, strângerea poate fi simultană, iar comanda unică şi plasată cât mai comod pentru muncitor;
- motoarele şi aparatele care compun acţionările pneumatice sunt, în general, de construcţie normalizată, ceea ce conduce la economii de manoperă în proiectare şi la reducerea preţului de cost;
- la temperaturi scăzute ale mediului înconjurator aerul comprimat nu îngheaţă în conducte, iar după efectuarea lucrului mecanic nu necesită instalaţii speciale de evacuare.
În vederea asigurării unei exploatări raţionale a instalaţiilor pneumatice se impun unele măsuri şi anume:
- să se menţină în reţeaua de aer comprimat o presiune de lucru de 3,9 x 105 – 4,9 x 105 N/m2 (4 – 5 kgf/cm2). În acest scop se interzice racordarea de consumatori mari de aer la reţeaua care alimentează dispozitivele (camere de sablaj, instalaţii de curăţire etc.) şi toate îmbinările fixe şi mobile vor fi etanşate în mod corespunzător;
- să se dirijeze în instalaţiile pneumatice aer comprimat uscat şi purificat deoarece, în caz contrar, se produce oxidarea şi înfundarea aparaturii şi a motoarelor pneumatice;
- să se asigure jetului de aer comprimat proprietăţi lubrifiante în vederea ungerii tuturor suprafeţelor mobile în contact, întrucât funcţionarea normală şi durata în exploatare a instalaţiilor pneumatice depind de calitatea ungerii.
Din practica exploatării dispozitivelor pneumatice a rezultat că dacă se respectă anumite măsuri privind reţeaua de aer comprimat, dacă proiectarea este raţională şi execuţia îngrijită, dispozitivele acţionate pneumatic satisfac toate condiţiile unei funcţionări sigure, necesare fabricaţiei de serie mare şi de masă.
1.2. Aerul ca agent de lucru
Aerul curat şi uscat conţine 78% N2 + 21% O2, 1% alte gaze (tabel 1.1).
Tabelul 1.1
Compoziţia sa este aceeaşi până pe la 20 km înălţime, dar densitatea scade; de fapt,
densitatea depinde de altitudine, presiune şi temperatură. La nivelul mării şi p = 1 bar, t =
150C, aerul este caracterizat de = 1,209 kg/m3. În condiţii normale 1 cm3 de aer conţine
2,705 x 1019 molecule/cm3 (t = 0 0C).
Pentru înţelegerea fenomenelor ce vor fi descrise în continuare se va considera că:
- Gazele conţin un număr mare de molecule identice;
- Dimensiunile lor sunt neglijabile în raport cu distanţele dintre ele;
- Moleculele se află într-o mişcare continuă, haotică, fiecare moleculă ascultă de legile mecanicii clasice;
- Traiectoriile moleculelor sunt linii drepte şi mişcările sunt libere;
- Ciocnirile dintre molecule şi dintre molecule şi pereţii despărţitori sunt perfect elastice.
Bibliografie
1. Barber, A. Pneumatic Handbook, Elsevier Science Ltd, Oxford, U.K., 1997.
2. Bleux, J.-M. Pneumatique industrielle, Editions Nathan, Paris, France, 2001.
3. Bucuresteanu, A. Actionari hidraulice si pneumatice, Editura Printech, Bucuresti, 2003.
4. Bucuresteanu, A., Isar, D. Elemente si sisteme pneumatice. Aplicatii industriale, Editura Certex, Bucuresti, 2007.
5. Dorin, Al., Dobrescu, T. Actionarea pneumatica a robotilor, Editura Bren, Bucuresti, 2002.
6. Moreno, S., Peulot, E. La pneumatique dans les systemes automatises de production, Editions Casteilla, Paris, France, 2001.
7. Prodan, D., Dusan, C., Bucuresteanu, A. Actionari pneumatice. Elemente si sisteme, Editura Printech, Bucuresti, 2004.
8. *** ASCO JOUCOMATIC - Pneumatic Components for Industrial Automation.
9. *** PARKER - Global Pneumatics.
10. *** REXROTH - Pneumatik Trainer.
Preview document




















































































































































Conținut arhivă zip
- ANEXA.pdf
- Cap 1.pdf
- Cap 2.pdf
- Cap 3.pdf
- Cap 4.pdf
- Cap 5.pdf
- Curpins.pdf
Alții au mai descărcat și

Capitolul 1 Prezentare generală ECHIPAMENTE DE TRANSPORT CONTINUU Automatizarea proceselor de producţie are ca o consecinţă imediată creşterea...

ARGUMENT Având în vedere ca apariția primelor automobile este strâns legata de descoperirea și perfecționarea mașinii cu abur și a motorului cu...

ARGUMENT Cuplaje intermitente. Acest procedeu este des întâlnit in domeniul mecanic si de aceea in acest proiect as dori sa explic cat mai bine...



4. COMPRESOARE 4.1. Definiţii. Clasificare Compresoarele sînt maşini de forţă generatoare care cresc presiunea debitului de gaze pe care îl...


.Clasificarea traductoarelor • Din punct de vedere al necesităţii de a fi alimentat cu energie din exterior: - TR pasive - alimentate cu energie...
Te-ar putea interesa și

1.Generalitati. Incercarile de obtinere a unor noi materiale superperformante au condus la dezvoltarea unei clase de produsi cunoscuti sub...

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

CAPITOLUL 1 Prezentarea generală a roboţilor industriali 1.1 Descrierea roboţilor industriali Actualmente, mediile industriale trebuie să...

1. Introducere Denumirea ROBOT a fost introdusă de către scriitorul ceh Karl Capek în lucrarea sa ,,Roboţii universali ai lui Rossum”,(1921),...

CAPITOLUL 1 INTRODUCERE 1.1. GENERALITATI Robotica reprezintă un domeniu de ştiinţă multidisciplinar, care cuprinde elemente de Fizică,...

GENERALITĂŢI 1 MATERIALE CU MEMORIA FOMEI 2 MATERIALE INTELIGENTE 3 Materiale inteligente – DEFINITII, CONCEPTE 3 Materiale inteligente -...

Executarea carcaselor în construcţia sudată conduce la uşurarea considerabilă a acestora. Deci la economie de material. Faptul că aceste carcase se...
