
Extras din curs
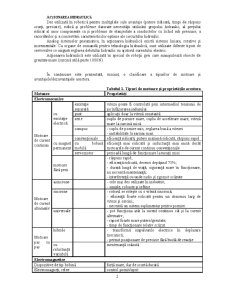
1. Sisteme de acţionare
Modul de acţionare a robotului este dictat, în general, de mai mulţi factori:
- sarcina de manipulare;
- precizia de poziţionare;
- mediul de lucru;
- viteza de lucru;
- preţul de cost.
Acţionarea roboţilor depinde de sursa de energie folosită. Astfel:
ACŢIONAREA ELECTRICĂ
Energia electrică este cea mai bine stăpânită la ora actuală, permiţând o comandă precisă şi
fiabilă, întreţinere uşoară şi preţuri reduse.
Principalul dezavantaj rezultă din raportul mic putere/masă al motoarelor.
Elementul esenţial al instalaţiilor de acţionare electrice ale roboţilor îl constituie motorul
electric. Majoritatea roboţilor echipaţi cu o astfel de acţionare utilizează motoare de curent continuu
(aprox. 80%). Există firme constructoare de roboţi care folosesc motoare electrice pas cu pas şi mai
recent, motoare de curent alternativ.
Motoarele de curent continuu pot roti axa la viteze ridicate şi se pot adapta uşor la sistemele
de reglare automată (buclă închisă). Pentru reglarea vitezei se cuplează variatoare electronice
simple. În componenţa lor se introduc diverşi traductori optici pentru a se controla viteza şi poziţia
axei motorului. Aceste motoare sunt simple, au întreţinere uşoară şi preţul de achiziţionare relativ
mic.
Cu toate aceste avantaje, motoarele de curent continuu, deşi mult utilizate şi îmbunătăţite, au
o serie de dezavantaje: sunt grele, prezintă surse de jocuri între anumite piese, frecări, vibraţii,
colectori prin contact mecanic, deci care se uzează relativ repede, necesită sistem de transmisie spre
reductor (curele, angrenaje).
Unele firme (exemplu ABB) au trecut la echiparea roboţilor cu motoare cu antrenare directă,
a căror axă de vine axă a articulaţiei robotului, fără alt sistem de transmisie intermediar, dar
utilizarea în această variantă prezintă încă o serie de dificultăţi legate în special de aspectele
dinamice ce se manifestă când robotul este în sarcină.
Un alt tip de motor mai recent este motorul sincron „autopilotat” la care rotorul este
constituit din magneţi permanenţi, numit şi motor sincron cu comutare electronică şi care nu mai
foloseşte colectori cu perii (motor brushless). Absenţa colectorului fizic, partea fragilă a motoarelor
de curent continuu, înlătură un mare dezavantaj al acestor motoare, determinând ca aceste motoare
să fie mult mai fiabile.
În concluzie, motoarele electrice prezintă avantajul de a fi mai uşor de exploatat, instalaţia
de acţionare fiind mai simplă, reglarea automată comodă. Trebuie însă reţinut că puterea lor (la
mase egale) este inferioară motoarelor hidraulice.
ACŢIONAREA PNEUMATICĂ
Utilizată frecvent pentru realizarea diferitelor automatizări, pneumatica este mai des utilizată
pentru realizarea manipulatoarelor secvenţiale.
Acţionarea pneumatică se poate împărţi în două mari grupe, în funcţie de cursa elementului
de ieşire, care poate fi limitată sau nu.
Din prima categorie fac parte sistemele de acţionare liniare (pot fi cu simplu efect, cu simplu
efect cu resort, cu dublu efect sau amortizate), rotative (sunt alcătuite dintr-un sistem de acţionare
liniar şi un sistem mecanic de transformare a mişcării liniare în mişcare rotativă – roată-cremalieră,
şurub-piuliţă) şi incrementale.
Sistemele de acţionare ce au cursa nelimitată sunt motoarele cu pistoane, motoarele cu
palete ireversibile şi reversibile şi motoarele cu angrenaje.
2
ACŢIONAREA HIDRAULICĂ
Des utilizată în robotică pentru multiplele sale avantaje (putere ridicată, timpi de răspuns
scurţi, precizie), ridică şi probleme datorate necesităţii utilizării grupului hidraulic, al preţului
ridicat al unor componente ca şi probleme de etanşeitate a conductelor cu lichid sub presiune, a
racordărilor şi a conservării caracteristicilor optime ale circuitului hidraulic.
Analog sistemelor pneumatice, în acţionarea hidraulică există
Preview document
















































Conținut arhivă zip
- Logistica Industriala
- Actionare_Senzori.pdf
- AGV.pdf
- Introducere_Logistica_Industriala.pdf
- Mecanisme de orientare.pdf
- Miscari_fundamentale.pdf
- Modelarea Geometrica a Robotilor.pdf
- Prehensoare.pdf
- Roboti Industriali.pdf
Alții au mai descărcat și

CAPITOLUL 1 Prezentarea generală a roboţilor industriali 1.1 Descrierea roboţilor industriali Actualmente, mediile industriale trebuie să...

1. Generalitǎți În vederea achiziţionării de imagini şi transformării lor în imagini digitale sunt necesare două elemente: un dispozitiv (senzor)...

- Suspensia clasica (fig.1) – arcuri si amortizoare: Fig. 1 – Suspensia automobilului clasic - Suspensia activa (fig. 2) – rolul arcurilor si...

Capitolul 1 Mecanic˘a geometric˘a ”La început a fost mecanica. (Max von Laue, Mecanica, cf. [43], p. 25)” Mecanica clasic˘a (newtonian˘a) are un...

A. GENERALITĂŢI Sistemul de direcţie este un ansamblu de organe care servesc la orientarea roţilor de direcţie ale automobilului. Pentru a...

1.1. Scurt istoric al apariţiei şi dezvoltării sistemelor de fabricaţie flexibilă (SFF) În analiza evoluţiei modelului dominant aplicat...

CERCETARI OPERATIONALE (CO) Cercetarea operationala a aparut în timpul celui de-al doilea razboi mondial, când liderii militari au cerut...

1.1. NOTIUNI SI CONCEPTE FUNDAMENTALE 1.1.1. Observaţii preliminare Timp de mai multe secole oamenii au avut ca o preocupare principală...
Te-ar putea interesa și


1. DEFINIREA ŞI ROLUL CONCEPTULUI DE LOGISTICĂ ÎN MANAGEMENTUL ÎNTREPRINDERILOR INDUSTRIALE 1.1. Conceptul de logistică. Definire şi evoluţie...

INTRODUCERE Lucrarea ”Managementul aprovizionării în cadrul companiei Michelin România” vizează dezvoltarea unui model de luare a deciziilor...

INTRODUCERE Prin prezenta lucrare se urmăreşte îmbunătăţirea calităţii produselor, identificarea nivelului de satisfacţie a serviciilor oferite...

INTRODUCERE Avântul economic înregistrat de societatea umană în ultima perioadă, a implicat o creştere fără precedent a comerţului internaţional....

Capitolul 1.Piața imobiliară 1.1.Caracteristici generale ale pieței imobiliare Piaţa imobiliară este alcătuită din totalitatea tranzacţiilor ce...

1. Identificarea produsului A. Caracteristici generale ale produsului: Materia prima pentru fabricarea diferitelor modele de caramida THERMOKRON...

CAPITOLUL 1. PIAȚA IMOBILIARĂ 1.1.Caracteristici generale ale pieței imobiliare Piața imobiliară este alcătuită din totalitatea tranzacțiilor ce...