
Extras din curs
1.1Rolul şi locul traductoarelor în sistemele automate.
Una din funcţiile indispensabile pentru conducerea eficientă a unui proces, indiferent de procedeele şi mijloacele aplicate, este aceea de informare. Deciziile de conducere pot fi luate numai pe baza unor informaţii cât mai corecte şi mai complete asupra unor parametri semnificativi pentru caracterizarea tehnico-economică a procesului. Informaţiile respective, reprezentând în ultima instanţă valori ale unor mărimi fizice (sau ale unor indicatori calculaţi prin intermediul acestora), chiar şi în cazul conducerii manuale se obţin ca rezultat al unor operaţii de măsurare.
Definiţia clasică a operaţiei de măsurare, fundamentată pe noţiunea de unitate de măsură, arată că a măsura înseamnă a stabili pe cale experimentală valoarea (numerică) a unei mărimi fizice necunoscute măsurând-o prin compararea cu o mărime de aceeaşi natură aleasă în mod convenţional ca unitate.
Uzual, măsurările sunt efectuate cu participarea unui operator uman, participare care se reflectă în mod direct în obţinerea rezultatelor. Ţinând cont de acest aspect, operaţia de măsurare ca o comparaţie direct perceptibilă a mărimii de măsurat cu unitatea nu este posibilă decât într-un număr restrâns de cazuri în care unităţile pot fi realizate sub o formă care să permită, utilizarea lor ca atare. Restricţiile apar, pe de o parte, datorită faptului că există numeroase mărimi fizice care nu sânt accesibile simţurilor umane, iar, pe de altă parte, chiar şi în situaţiile celor care posedă această proprietate numai un domeniu limitat de valori poate fi sesizat. Din aceste motive măsurările se efectuează, în marea majoritate a cazurilor, cu ajutorul aparatelor de măsurat.(ex. de ap de măs.) Astfel, prin aparat de măsurat se înţelege acel dispozitiv care stabileşte o dependenţă între mărimea de măsurat şi o altă mărime ce poate fi percepută în mod nemijlocit de organele de simţ umane, de o manieră care permite determinarea valorii mărimii necunoscute în raport cu o anumită unitate de măsură.
Sunt prezentate în continuare câteva standuri de mecanisme şi un robot la care citirea parametrilor cinematici se realizează cu traductoare incrementale de tip „MOUSE”, iar prelucrarea datelor cu programe educaţionale, „PASCAL”, „C”. Citirea parametrilor dinamici se face cu traductoare rezistive. Accentul este pus pe monitorizarea mişcării mecanismelor, indiferent de tipul utilizat: mecanism camă-tachet, cu bare, cu roţi dinţate. Aplicaţia cea mai comodă este cea în care avem de citit două axe şi în care vom utiliza o intrare serială (COM1), deci un „MOUSE”. Pentru 4 axe citite, cum este cazul robotului am utilizat două intrări seriale, deci doi „MOUSE”.
În rest problema a constat în adaptarea, confecţionarea şi implementarea discurilor incrementale la axele a căror mişcare trebuie să o măsurăm, putând fi citite de fotocelulele plăcuţelor de „MOUSE”.
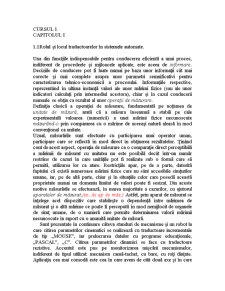
1.1.1. Stand pentru monitorizarea în timp real a funcţiilor de transmitere la mecanismele camă - tachet
Standul este format dintr-o pompă de injecţie, (fig.1) secţionată pentru a urmări şi forma camelor, un motor electric de curent continuu, sursă stabilizată, o transmisie de tip melc-roată melcată, [2]. La arborele camei se montează primul disc incremental care are rolul să citească unghiul de rotaţie al acestuia. Mişcarea tachetului este monitorizată prin montarea unui ceas comparator la care în locul acului indicator s-a montat cel de-al doilea disc, care de data aceasta este chiar de „MOUSE”. Astfel pe baza unui program în „PASCAL” citirile discului de pe camă sunt vizualizate pe axa X, iar celui de pe tachet pe axa Y. În acest fel pe monitor vor apărea în timp real funcţiile de transmitere ale deplasării, iar prin derivare numerică şi ale vitezei şi acceleraţiei. Analizând curbele respective se pot trage concluzii legate de legile de mişcare, precizia cu care sunt realizate. Menţionăm că precizia de măsurare şi calcul este foarte bună
Preview document







































































Conținut arhivă zip
- Traductoare
- curs1.doc
- curs2.doc
- curs3.doc
- curs4.doc
- curs5.doc
Alții au mai descărcat și

INTRODUCERE Exploatarea zăcămintelor de petrol din ţara noastră se face prin mai multe sisteme şi anume: erupţie naturală, erupţie artificială,...

PARTEA I.PROIECTAREA TEHNOLOGIEI DE FABRICAŢIE 1. Analiza funcțional - constructivă a piesei 1.1 Codificarea și clasificarea suprafețelor piesei...

Memoriu justificativ Tendinţele care se manifestă pe plan mondial în domeniul tehnologiilor de deformare plastică, atât din punct de vedere...

CAPITOLUL I. Analiza şi completarea datelor iniţiale (de bază) provind proiectarea tehnologică a aparatului şi subansamblului precizate în tema...

1.1. PROIECTAREA DISPOZITIVELOR DE AMESTECARE Generalitati In aparatele destinate realizarii proceselor de amestecare, mediul primeste energie...

NOŢIUNI DE METRLOGIE 1. OBIECTUL METROLOGIEI Metrologia este ştiinţa care se ocupă cu măsurile, unităţile de măsură, sistemele de unităţi de...

INTRODUCERE Noţiuni introductive de metrologie Conducerea automată a proceselor implică luarea unor decizii referitoare la modul în care trebuie...

BCE curs 1 8.10.2009 Bibliografie: - Bazele cercetarii experimentale: Cretu Gheorghe; - Metode de cercetare experimentale in constructia de...
Te-ar putea interesa și

ARGUMENT Scopul lucrării este de a face o prezentare a pricipiilor de funcţionare ale celor mai uzuali senzori din compunerea traductoarelor...

INTRODUCERE Progresele din domeniul tehnicii măsurării sunt strâns legate de progresele din domeniul senzorilor şi traductoarelor şi de cele din...

ARGUMENT În acesta lucrare voi aprofunda tema “Traductoare de presiune”. Scopul lucrării constă în cunoaşterea structurii şi principiul de...

Argument Electronica si automatizari – cuvinte cu rezonanta vasta in lume - joaca un rol de frunte si ca ramura industriala se situeaza prioritar...

1. Noţiuni generale Prin aparat de măsurat se înţelege acel dispozitiv care stabileşte o dependenţă între mărimea de măsurat şi o altă mărime ce...

Aparatele electronice pentru măsurarea mărimilor neelectrice, deşi de o mare diversitate, au în general o structură comună care este prezentată,...

1. Traductoare inductive de proximitate În scopul măsurării mărimilor fizice care intervin într-un proces tehnologic, este necesară de obicei...

Traductoare Pentru măsurarea mărimilor fizice care intervin într-un proces tehnologic este necesară, de cele mai multe ori, convertirea...