Extras din curs
Cap.1 Analiza structurală
Element cinematic. Cuplă cinematică. Mecanism. Mașină.
Cursul are în vedere atât studiul mecanismelor și mașinilor sub aspect structural, cinematic și dinamic, cât și organele de mașini ce intră în componența acestora.
Mecanismul este alcătuit din corpuri cu mișcări determinate având ca scop transmiterea și transformarea mișcării. Mașina este un sistem tehnic cu mișcări determinate care realizează un lucru mecanic util sau transformă o formă de energie în altă formă de energie. In funcție de scop, există două categorii de mașini:
- Mașini motoare , care transformă diferitele forme de energie în energie mecanică de mișcare
- Mașini de lucru, care transformă energia mecanică de mișcare în lucru mecanic util
Mașinile motoare pot fi grupate astfel:
a) mașini motoare primare, care utilizează ca sursă de energie unele forme de energie obținute din natură (prin extracție). Ca exemple de mașini motoare primare sunt: motoarele hidraulice (folosesc energia căderilor de apă), turbinele cu abur (folosesc energia termică obținută prin arderea combustibililor naturali), motoarele cu ardere internă (folosesc energia chimică a combustibililor).
b) mașini motoare secundare, care transformă în energie mecanică o formă de energie prelucrată, obținută de o altă mașină. Exemplu: motorul electric (de c.c. cu excitație în serie - locomotive, tramvai, metrou; de c.c. cu excitație în parallel - ștergător de parbriz; de c.a. sincron - diverse pompe; de c.a. asincron - mașini-unelte, utilaje metalurgice)
Mașinile de lucru sunt:
a) prelucrătoare, realizând modificarea stării / formei obiectului. Exemple: mașini - unelte, mașini textile, concasoare etc.
b) transportoare , realizând deplasarea obiectelor. Exemple; benzi și scări rulante, macarale, poduri rulante etc.
Frecvent, în tehnică se utilizează un sistem format dintr-o mașină motoare secundară cuplată la o mașină de lucru (prelucrătoare sau transportoare). Acest sistem poartă numele de agregat.
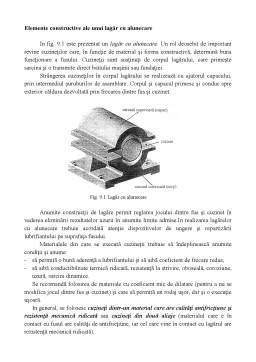
Mecanismele sunt alcătuite din corpuri (numite elemente cinematice), care prin intermediul unor legături (numite cuple cinematice) preiau și transmit mișcarea și forțele. Există cazuri când un element cinematic este format din mai multe piese, cum ar fi biela unui motor (Fig. 1.1). Aceste piese (capac, șuruburi, corpul bielei, cuzineți) sunt astfel îmbinate încât ansamblul care se obține (biela) formează un sistem rigid.
Deci, prin element cinematic se poate înțelege un corp / ansamblu de corpuri rigide cu mișcare determinată în structura mecanismului. Cupla cinematică reprezintă legătura directă, permanentă și mobilă dintre două elemente, care permite mișcarea relativă dintre acestea.
Fig. 1.1 Bielă
Clasificarea cuplelor cinematice
Gradul de libertate al unui punct material/sistem de puncte materiale/rigid/ sistem de rigide este egal cu numărul parametrilor independenți care poziționează aceste elemente în raport cu un sistem de referință exterior considerat fix. Gradul de libertate corespunde numărului posibilităților de mișcări simple ale sistemului. Un punct material în spațiu are 3 grade de libertate, corespunzătoare celor 3 coordonate de poziționare.
Poziția unui solid rigid în spațiu este determinată de 3 puncte ale sale (9 coordonate de poziționare, între care există relații de legătură cunoscute care exprimă distanța dintre 2 puncte în spațiu, constantă în ipoteza solidului rigid. Prin urmare, din cei 9 parametri care determină poziția unui solid rigid în spațiu, datorită existenței celor 3 condiții de legătură, rezultă că numai 6 parametri sunt independenți. Deci, un corp liber în spațiu are 6 grade de libertate, cărora le corespund 6 posibilități de mișcare în spațiu (3 rotații și 3 translații):
3R + 3T = RT + RT + RT, unde R= rotație, T = translație, RT = roto-translație
Gradul de mobilitate (M) al unui sistem de corpuri materiale este gradul său de libertate în raport cu un element care-i aparține considerat fix.
Dacă simbolizăm prin litera K numărul condițiilor de legătură/restricții introduse de cupla cinematică și cu litera M numărul posibilităților de mișcare relativă, vom obține relația:
K + M = 6
Preview document









































































































Conținut arhivă zip
- MOM SIM.docx
Alții au mai descărcat și

Capitolul 1. Rezumatul proiectului În acest proiect voi folosi un serviciu de virtualizare numit Docker pentru a rula diferite servicii....

Scopul acestui proiect este de a crea un dispozitiv care identifică sunetele păsărilor din înregistrări audio. Scopul acestui proiect este de a...

Un filtru digital sau numeric este un sistem discret care scaleaza si/sau defazeaza in mod selectiv componentele spectrale ale semnalului discret...

Prezentarea companiei S.C. BeTheOne S.R.L. este o societate cu scop lucrativ înfiinţată în anul 2000, dorința de a te exprima și nevoia de a-ți...

1. Introducere "O secvență video este o succesiune de imagini digitale (scene statice) care se redau în timp succesiv la un interval de redare...

Circuitele electronice sunt circuite electrice, ce constau din elemente pasive (R, L,C, etc.), care conțin și elemente și component electronice (...

1. Semnale analogice si numerice(digitale) În domeniul telecomunicațiilor, procesării semnalelor, sau mai general în electricitate și electronică,...

The functioning of any society depends upon information, and the efficient and effective communication of it among society's members. Information...