
Extras din notiță
OPTIMIZAREA STRUCTURALA A MECANISMELOR I ->Optimizarea structurală a mecanismelor nu este în general un scop în sine, ea trebuie mai degrabă să răspundă unor cerințe tehnologice, cinematice, statice sau dinamice. Cât privesc modalităţile concrete de optimizare, acestea sunt în bună parte deja cunoscute, adică se realizează tocmai prin cazurile atipice de cuple, precum introducerea de cuple pasive, cuple multiple, policuple, cuple cu mobilităţi potenţiale efectiveO cerinţă cinematică de optimizare structurală necesita introducerea unor cuple cu mobilităţi potenţiale fp mai mari decât cele efective fe (fp > fe), Luăm ca ex. mecanismul patrulater plan la care axele cuplelor de la bază nu au asigurate paralelismul necesar: mecanismul sau se blochează sau funcţionează cu tensionări/uzuri pronunţate în articulaţii.
O cerinţă statică pentru optimizarea structurală necesită introducerea unor cuple pasive. Luăm ca ex. patrulaterul la care asigurarea rezemării arborilor pe ambele capete conduce la reducerea deformaţiilor/solicitărilor de contact şi de încovoiere
Legi de mişcare a tachetului
Legea de mişcare a tachetului se defineşte fie prin variaţia deplasării, fie prin variaţia vitezei sau a acceleraţiei lui. Dintre acestea, deplasarea este cea care determină profilul camei. Stabilirea legii de mişcare pentru tacheţii mecanismelor cu camă se face în funcţie de rolul pe care aceste mecanisme îl joacă în cadrul sistemului mecanic mobil. La proiectarea mecanismelor cu camă se disting două situaţii: - când deplasarea s, a tachetului interesează în orice moment de funcţionare al mecanismului; (cazul mecanismelor de măsurare); - când deplasarea tachetului interesează numai în anumite momente, situaţie întâlnită la automatizări, unde prin deplasarea tachetului se închide sau deschide un circuit la intervale de timp bine determinate (mecanisme de comandă). Mişcarea periodică a tachetului se caracterizează, în cazul general, prin existenţa următoarelor faze de funcţionare, indicate în ciclograma carteziană a mişcării (fig.6.1): - faza de ridicare, caracterizată prin rotaţia camei cu unghiul ϕu şi ridicarea tachetului de la ro la rmax = ro+h ; - faza de coborâre, caracterizată prin rotirea camei cu unghiul ϕ c şi coborârea tachetului de la rmax la ro; - faza de staţionare inferioară, în care, deşi cama se roteşte cu unghiul ϕ ri , tachetul nu se deplasează, rămânând la raza ro; - faza de staţionare superioară, în care, deşi cama se roteşte cu unghiul ϕ rs , tachetul nu se deplasează, rămânând la raza rmax. În interiorul unei faze se pot aplica mai multe funcţii de transmitere de ordinul zero s = s(ϕ), în acest caz funcţia de transmitere a fazei devine o funcţie compusă.
Angrenaje cilindrice evolventice cu dinţi înclinaţi I
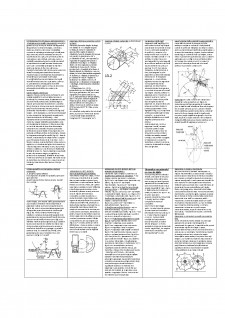
Generarea flancurilor dinţilor înclinaţi este diferită de cea a dinţilor tangent la- drepţi, în sensul că segmentul de generare MN, cuprins în planul π cilindrul de bază (de diametru db) nu mai este paralel cu generatoarea AA’ a şi- cilindrului de bază, care reprezintă şi segmentul de tangenţă între planul π cilindrul de bază (fig.13.1). Unghiul dintre cele două segmente, la nivelul cilindrului de bază, este βb. Trebuie precizat, însă, că unghiul de înclinare al dintelui depinde de cilindrul pe care este definit, în calcule fiind utilizate unghiurile de înclinare pe cilindrul de divizare β şi pe cilindrul de bază βb. Unghiul de înclinare pe un cilindru oarecare, de diametru dy, se determină cu relaţia tgβy = (dy/d)tgβ, d fiind diametrul cilindrului de divizare.
- - Planul frontal t - t, (13.2), perpendicular pe axa cilindrului de bază (deci şi pe generatoarea AA’) nu se mai suprapune peste planul normal n - n, (13.2), perpendicular pe direcţia dintelui, între aceste plane existând unghiul βb. Pentru un punct K de pe segmental de generare MN, în cele două plane, se definesc două raze de curbură şi anume K’K=ρt, respectiv K’’K =- ρn, acestea fiind razele
de curbură ale evolventelor din cele două plane, în punctul K. Între aceste raze de curbură există relaţia (stabilită din triunghiul K’KK”, dreptunghic în K’)Angrenaje cilindrice evolventice cu dinţi înclinaţi II (13.1)
13.2
1 Angrenajul roată-roată Angrenajul roată-roată (fig.12.1) este format din două roţi dinţate caracterizate de numerele de dinţi z1 şi z2, coeficienţii deplasărilor de profil x1 şi, respectiv, x2 şi acelaşi modul m pe cercurile de divizare. Normala comună n - n la profilele în contact trece prin polul angrenării C şi este tangentă la cercurile de bază ale celor două roţi, de diametre db1 şi db2, în punctele T1 şi T2. Cercurile de rostogolire, de diametre dw1 şi dw2, sunt tangente în polul angrenării C şi determină distanţa dintre axe aw. Pe dreapta de angrenare n - n sunt definite segmentul teoretic de angrenare T1T2 şi segmentul real de angrenare AE, determinat de intersecţia dreptei de angrenare cu cercurile de cap ale celor două roţi dinţate. Intrarea profilelor în angrenare are loc în punctul A, iar ieşirea în punctul E. Punctul curent de contact dintre profile descrie segmentul real de angrenare AE, respectiv flancurile active ale profilelor dinţilor în contact (reprezentate cu linie îngroşată în fig. 12.1). Forţa dintre profile acţionează după normala comună n - n, punctul ei de aplicaţie deplasându-se pe toată lungimea profilului activ al dintelui.
Linia de angrenare. Pentru o angrenare corectă, normala comună la profile în toate punctele de contact, trece tot timpul prin punctul primitiv C. Profilele care satisfac această condiţie, sunt profilele conjugate şi mişcarea este cu raport de transmitere constant. Punctul de contact se deplasează de-a lungul linie ce angrenare.
Preview document


Conținut arhivă zip
- Mecanisme.docx
Alții au mai descărcat și

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...

1 ROLUL ȘI EVOLUȚIA PRELUCRĂRILOR PRIN AȘCHIERE Prelucrare prin așchiere este un proces mecanic de îndepărtare sub formă de așchii a unui strat...


1.Calculul gradului de mobilitate la mecanismele plane Numarul de parametri de pozitie independenti care determina univoc pozitia unui mecanism...

Pompele cu roti dintate fac parte din grupa pompelor volumice ro-tative, care se deosebesc de turbopompele denumite ,,cu rotor", la care lichidul...

Masurarea diametrelor si a abaterilor de la forma geometrica Masurarea diametrelor exterioare, interioare si a adancimilor cu ajutorul sublerului...

“When you think about it, almost everything on this planet either is a fluid or moves within or near a fluid.” (F. M. White) Fluidele - esentiale...

1.1. Generalități Mecanica este știința care studiază una din cele mai simple forme de mișcare a materiei cunoscută sub numele de mișcare...
Te-ar putea interesa și

Introducere Contextul socio-politic actual este înţesat de diverse intrigi, dependente într-un mod direct de conflictele de interese de diferite...

Sinteza Dimensională Sinteza dimensională constă in determinarea parametrilor constructivi ai mecanismului pornind de la condiţiile funcţtionale...

Tema de proiect: MECANISM PĂŞITOR ARTICULAT Proiectul de diplomă, prezentat în paginile ce urmează, cu titlul de mai sus, este făcut sub...

PROIECTAREA UNUI MECANISM CU BARE Sa se efectueze analiza structurala,cinematica si cinetostatica pentru mecanismul manivela-piston...

Capitolul 1. Date inițiale Să se proiecteze un mecanism de acționare a cupei pentru un excavator cu cupă inversă și să se studieze comportarea...

CAPITOLUL 1. CARACTERIZAREA MECANISMELOR DECIZIONALE LA NIVELUL UNIUNII EUROPENE În cadrul Uniunii europene spre deosebire de instituţiile...

Introducere Economia de piaţă situează în centrul activităţii economice întreprinderea. Rezultatele obţinute de întreprinderi determină pozitiv...

I. Introducere Politica monetară este o componentă de bază a politicii economice, alături de alte componente, în principal politica fiscală si...