
Extras din laborator
1. Scopul lucrarii:
Cunoasterea particularitatilor de prelucrareale pieselor optice si a modului in care se controleaza piesa in urma slefuirii si a polisarii.
2. Consideratii tehnologice:
Prelucrarea sticlei optice prezinta dificultati aparte fata de prelucrarile mecanice din mai multe motive:
- duritatea mare a sticlei (≈8 pe scara Mohs);
- precizia dimensional deosebita ceruta piselor optice;
- rugozitatea suprafetelor optice active care asigura transaparenta pieselor optice este cuprinsa intre 0.003÷0.012 µm.
Particularitati de prelucrare ale piselor optice:
- prelucrarile se pot executa numai cu material abrazive;
- prelucrarea unei piese se face de la semifabricat pana la piesa finita folosind o singura asezare;
- controlul suprafetelor finisate se poate face numai intreferometric cu calibre optice sau pe interferometru.
Suprafetele active ale pieselor optice se obtin prin succesiunea a doua operatii (excluzand operatia de debitare):
- slefuire – prin care se asigura obtinerea preciziei dimensionale;
- polisare – prin care se asigura transparent suprafetei sau o inalta calitate a rugozitatii.
Controlul slefuirii consta in:
- verificarea dimensiunii obtinute cu micrometrul sau sublerul;
- verificarea acuratetei cu lupa: se constata daca piesa are fisuri, intepaturi, pori.
Controlul polisarii consta in:
- verificarea preciziei dimensionale cu calibre optice care prin aspectul si numarul N al franjelor de interferenta pun in evident marimea abaterii de la planeitate sau sfericitate;
- verificarea acuratetei cu lupa pune in evident pete oxidate, puncte, zone neprelucrate.
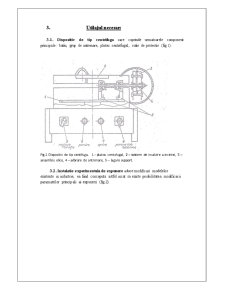
3. Utilaje necesare:
- Stung cu pedala;
- Platou de blocare;
- Platou de slefuire cu abraziv liber;
- Polisor;
- Parafina de blocare;
- Suspensie de carborund M28 si M14 in apa;
- Micrometru sau subler;
- Suspensie de oxid de ceriu - 3µm in apa;
- Lupa;
- Calibru optic plan;
- Placuta de sticla
Preview document










Conținut arhivă zip
- Micro si Nano-Tehnologii
- 1.doc
- 2.doc
- 3.doc
- 4.doc
Alții au mai descărcat și

3.1.Accesul mijloacelor si al personalului pentru interventie in caz de incendiu se asigura in permanenta la toate: a) constructia unitatii cu...

Masuratorile directe de aceeasi precizie, reprezinta un volum important de lucrari, executate pe teren în cadrul activitatilor geodezice,...

Te-ar putea interesa și

Prezentare ţinută în cadrul mesei rotunde „Noi politici în domeniul învăţământului superior şi cercetării ştiinţifice din România”, UNESCO-CEPES,...

INTRODUCERE “Îmbătrânirea populaţiei este un fenomen global, care în ultimele decenii afectează toate ţările lumii. Reducerea globală a...

PROGRAME SI FONDURI UE PRE SI POST-ADERARE Pentru a sprijini pregătirea ţărilor candidate în vederea dobândirii statutului de membru al Uniunii,...

CAPITOLUL I Sisteme microelectromecanice Micro-Electro-Mechanical Systems, sau MEMS, este o tehnologie care, în forma sa cea mai generală poate...

Ultimele decenii in evolutia societaţii au cunoscut,fara indoiala mutaţii considerabile calitative cantitative rod unor spectaculoase evolutii in...

1.Introducere Ultimele decenii in evolutia societaţii au cunoscut,fara indoiala mutaţii considerabile calitative si cantitative, rod ale unor...

Microscopia electronică Cercetătorii au creat din aproape în aproape ştiinţa fizicii, plecând de la legile geometrice ale reflexiei şi refracţiei,...

1.Introducere In nanotehnologie, o particula este definita ca un obiect de mici dimensiuni,care se comporta ca unitate de ansamblu in ceea ce...