
Extras din laborator
Prezenta lucrare îsi propune explorarea solutiilor constructive si de control a
structurilor robotice ce se preteaza în cadrul constructiei unor roboti telecomandati
ce pot fi folositi în cazul interventiei în zone periculoase pentru operatorul uman.
În cadrul acestei cercetari au fost verificate câteva variante constructive de structuri
robot cu microcontroller, fiind aleasa cea mai convenabila sub raport pret/siguranta
în functionare/simplitate constructiva.
Explorarea structurilor clasice de controllere destinate controlului robotilor
industriali se cuvine a fi facuta pe baza unor precizari care sa stabileasca clar locul
acestei probleme - problema controlului structurilor robotice - în cadrul larg al
abordarii sistemice a structurilor robotice.
Definirea task-urilor pe care structura proiectata trebuie sa le îndeplineasca
creeaza numai cadrul abordarii problematicii controlului. Concentrarea efortului
proiectantului asupra realizarii dezideratelor referitoare la modul de deservire a
unei sarcini de lucru din partea robotului va trebui sa realizeze o balanta între
utilizarea unui model cât mai exact al structurii robotice, care sa înglobeze
majoritatea fenomenelor fizico-chimice ce au loc în cadrul sistemului robot, alaturi
de viteza de decizie si prelucrare a datelor obtinute în urma interactiunii robotului
cu mediul
Sintetizând afirmatiile anterioare problema controlului consta în
determinarea evolutiei temporale a end-effector-ului astfel încât acesta sa execute
miscarea sau ansamblul miscarilor comandate în cadrul task-ului.
Pe de alta parte structura mecanica, la rândul sau, impune o anumita
influenta asupra structurilor de control alese, fara a mai specifica influenta
complexa pe care o are alegerea tipului de miscare a robotului între sursa si tinta.
Aceste elemente impun un balans între structura hard si structura soft
(hardware/software trade-off), care sa corespunda cel mai bine cerintelor
beneficiarului.
Un alt aspect care influenteaza în mare masura tipul arhitecturii de control
alese este tipul actionarii. Astfel un motor de curent continuu considerat cu
mecanism reductor poate fi considerat ca un element de actionare linear, din punct
de vedere dinamic, cu constante fizic determinabile. Dar apar problemele datorate
alunecarii, frecarii si compliantei datorate sistemului de angrenaje care realizeaza
reductorul. Daca se apeleaza la o structura de actionare cu motor de curent
continuu, fara reductor, aceste probleme sunt eliminate, aparând în schimb
probleme datorate puternicei neliniaritati structurale a actuatorului.
Microcontrolerul PIC16F84 poate fi inclus perfect în aplicatii de comanda
a robotilor mobili, industria automobilelor, controlul motoarelor, senzori de
consum redus, chei electronice, controlul frecventei receptoarelor e.t.c.
Acesta este un tip de procesor de înalta performanta, CMOS, full static, pe 8
biti .Toate microcontrolerele din aceasta serie (16Fx) sunt construite pe o
arhitectura RISC avansata si prezinta facilitati avantajoase ale hardware-ului, stiva
de 8 nivele si multiple surse interne si externe de întrerupere . Magistrala separata
de date si de instructiuni a arhitecturii Harvard permite conlucrarea cuvântului
instructiune de 14 biti cu magistrala de date de 8 biti.
Microcontrolerul PIC16F84 realizeaza în mod tipic o compresie a codului de
2:1 si astfel o sporire a viezei de pâna la 2:1 (la 10MHz) fata de alte
microcontrolere de 8 biti din aceasta clasa . PIC16F84 are 68 de octeti de RAM, 64
de octeti de memorie EPROM de date si 13 pini I/O . Este disponibil si un
numarator/temporizator. Familia PIC16F84 aduce avantaje speciale prin reducerea
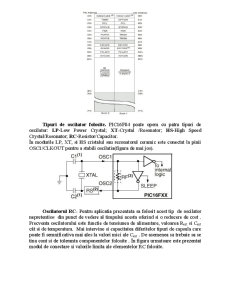
numarului componentelor externe si reducerea consumului de energie. Exista patru
optiuni ale oscilatorului, dintre care cel RC realizat cu un singur pin, ofera solutia
cea mai ieftina . Cel LP (low power) ofera consumul cel mai mic, XT (cristale cu
taieturXT) ofera posibilitatea lucrului cu cristal de cuart standard, iar HS (hig
speed) cu cristale de mare frecventa. Modul SLEEP (power down) ofera
economisirea de energie. Utilizatorul poate trezi chip-ul din starea SLEEP prin
câteva tipuri de întreruperi externe sau interne, precum si prin reset.
Preview document






Conținut arhivă zip
- Structuri Robotice Comandate cu Microcontroler.pdf
Alții au mai descărcat și

S 1. Definitia mecatronicii Cuvântul mecatronica a fost folosit pentru prima data de catre japonezi pentru a defini fuziunea tehnologica: mecanica...

(1)CLASIFICARE SISTEMELOR DE ACTIONARE ELECTRICA. a. Dupa nr de masini el si masini de lucru distingem: - sist de act el individuale la care o...

Amplificator de putere în contratimp Scopul lucrarii Lucrarea are ca scop studiul experimental al unor aspecte ale functionarii unui amplificator...

Introducere Corpurile solide au o structura cristalina cu atomii si moleculele distribuite într-o retea regulata, în care unitatea structurala...

1. Caracteristici 80C51 este un microcontroler vechi dar foarte raspîndit. Este necesara cunoasterea sa întrucît el a pus bazele unei familii de...

Stabilizatoarele de tensiune sunt circuite destinate obtinerii unor surse de tensiune continue aproape ideale. În consecinta parametrii de interes...

LUCRAREA DE LABORATOR nr. 1 Metode CAD de generare a schemelor electronice Scopul lucrării: Scopul lucrării de laborator nr.1 este acela de a...

4.1. Scopul lucrării: Cercetarea diferitelor regimuri de funcţionare a receptoarelor de energie legate în stea, în cazul conectării lor la o sursă...
Te-ar putea interesa și

1. Introducere Denumirea ROBOT a fost introdusă de către scriitorul ceh Karl Capek în lucrarea sa ,,Roboţii universali ai lui Rossum”,(1921),...

INTRODUCERE Cuvânt înainte Am ales această temă deoarece sunt pasionat de fotbal şi de roboţi şi ca totul să decurgă bine m-am gândit să îmbin...

INTRODUCERE Unul din cele mai importante aspecte în evoluţia fiinţei umane este folosirea uneltelor care sa-i simplifice munca fizica. În aceasta...

CAPITOLUL I SENZORI NUMERICI INCREMENTALI I. 1. NOTIUNI INTRODUCTIVE : Traductoarele numerice sunt cele care oferá la iesire unul sau mai multe...

INTRODUCERE Disciplina de Senzori şi Traductoare oferă studenţilor, de la profilurile electrice, cunoştinţele necesare înţelegerii principiilor de...

LUCRAREA NR. 1 1. Scopul lucrarii Dupa efectuarea primei lucrari de laborator studentii trebuie sa stie sa achizitioneze imagini folosind...

CAPITOLUL I . Schema bloc a unui robot Fig.nr.1.1.Sistemul robot Definiţie : sistemul este un ansamblu de elemente interconectate astfel încât...