Extras din laborator
Lucrarea 1
Sisteme de reglare automata (SRA) utilizate în
servosisteme – prezentare generala
1.1. Notiuni teoretice
1.1.1. Introducere
Un sistem de actionare electrica (SAE) simplu contine un motor si o sarcina mecanica,
numita si masina de lucru. Între cele doua elemente este prevazut un cuplaj mecanic: ambreaj, curea
de transmisie, roti dintate. Daca motorul utilizat este unul de curent alternativ atunci vorbim despre
un SAE de curent alternativ. Sursa de alimentare, cel mai la îndemâna pentru aceste tipuri de
motoare, este reteaua de curent alternativ cu frecventa de 50 Hz. Daca însa este utilizat un motor de
curent continuu vorbim despre un SAE de curent continuu si în acest caz sursa de alimentare cel
mai la îndemâna este un VTC comandat sau un redresor PWM, acestea la rândul lor fiind alimentate
de la reteaua de curent alternativ cu frecventa de 50 Hz.
Conectarea la sursa de alimentare se face prin intermediul unor contactoare si a unor relee de
protectie. Eventual, cum este cazul SAE cu dificultati în procesul pornirii datorita inertiei sau a
cuplului de sarcina ridicat, în echipamentul de conectare pot fi integrate si mijloace de reducere a
curentului de pornire (rezistoare sau reostate de putere în trepte precum si elementele necesare
conectarii si deconectarii acestora: relee de timp si contactoare de putere redusa).
În toate aceste situatii parametrii mecanici, cuplul electromagnetic dezvoltat de motor, viteza
si respectiv pozitia rotorului, nu pot fi controlati sau modificati din exterior de catre operator. Se
obtine astfel un SAE cu ‘conectare directa la retea’. Aceasta este situatia majoritatii SAE întâlnite în
industrie.
Însa în prezent se observa si o crestere a numarului de aplicatii în care se impune
modificarea parametrilor mecanici în timpul functionarii. Aceasta tendinta apare fie din necesitatea
obtinerii unor performante tehnice ridicate, cum este cazul masinilor unelte sau a robotilor
industriali, fie din ratiuni de eficienta economica, de reducere a consumului de energie electrica în
cazul aplicatiilor de mare putere: pompe, compresoare, ventilatoare sau tractiunea electrica.
Dezvoltarea acestui gen de SAE a fost încurajata si de progresele remarcabile înregistrate în cadrul
reglarii automate si a electronicii de putere.
Un servosistem este, la modul general, un sistem de reglare automata a pozitiei unei masini
de lucru (ML) cu ajutorul unui motor electric (ME). Tot sub aceasta denumire vom include si
sistemele la care se regleaza doar turatia masinii de lucru.
Exista doua mari tipuri de servosisteme în functie de tipul motorului electric utilizat:
- Sisteme de reglare cu motoare de curent continuu (MCC );
- Sisteme de reglare cu motoare de curent alternativ (MCA ) (asincrone si sincrone).
Pentru a putea modifica parametrii mecanici este necesar sa controlam parametrii electrici cu
care alimentam motorul, adica frecventa si amplitudinea tensiunii de alimentare în cazul motoarelor
de curent alternativ si doar amplitudinea tensiunii de alimentare în cazul motoarelor de curent
continuu. Avem nevoie deci de o sursa de alimentare cu parametrii reglabili si bineînteles de o parte
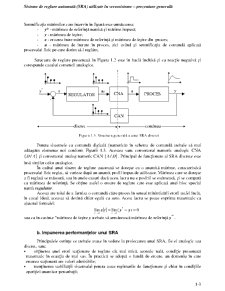
de reglare care sa furnizeze comanda catre acesta conform cu un algoritm prestabilit. Obtinem astfel
un sistem de reglare automata (SRA) cu motor electric, prezentat într-o varianta simplificata în
Figura 1.1. În aceasta figura sursa fixa de tensiune poate fi sursa de tensiune altenativa sau continua.
Sisteme de reglare automata (SRA) utilizate în servosisteme – prezentare generala
1-2
Blocul de comanda (sistemul de reglare) are rolul de a controla sursa de alimentare astfel
încât motorul sa functioneze la parametrii impusi. Este elementul central al unui sistem de reglare
automata pentru servomecanisme si va fi prezentat în detaliu în capitolele (lucrarile) viitoare.
Sursa fixa
de tensiune
Sursa reglabila
de tensiune
Motor
electric
Masina
de lucru
Sistem de
reglare
comanda
Figura 1.1. Sistem de actionare electrica cu tensiune de alimentare reglabila
1.1.2. Elemente de teoria sistemelor de reglare automata
a. Introducere
Sistemele de reglare automata sunt sistemele care realizeaza în mod automat controlul uneia
sau a mai multor marimi electrice, mecanice, termice, etc. Exemple de astfel de sisteme se gasesc
pretutindeni, de la aparatele de uz casnic, pâna la cele mai sofisticate sisteme de navigatie.
Exista astfel un numar mare de aplicatii, din domenii foarte diferite uneori, ce se pot încadra
însa în ceea ce numim sisteme de reglare automata. Elementele comune pot fi sintetizate într-o
schema generala ca cea prezentata în Figura 1.2.
Din punct de vedere constructiv partea de comanda poate fi analogica sau digitala
(numerica). În cazul analogic complexitatea metodei de reglare ce poate fi utilizata este redusa, însa
la fel este si posibilitatea de modificare în timp a acesteia. În plus în cazul sistemelor de reglare
analogica performantele sistemului variaza cu temperatura si se pot modifica în timp datorita
îmbatrânirii componentelor.
Dezavantajele mentionate pentru cazul sistemelor analogice sunt eliminate în cazul comenzii
numerice, algoritmul de reglare fiind implementat utilizând microcontrolere, microprocesoare sau
procesoare digitale de semnal (DSP). Programul de control poate fi teoretic oricât de mare si poate
fi modificat foarte usor în cazul în care se doreste schimbarea totala sau partiala a metodei de
reglare utilizate. Mai mult decât atât în cazul comenzii digitale poate fi dezvoltata o interfata
flexibila, ‘prietenoasa’, care sa faciliteze utilizarea practica a sistemului de catre orice persoana
indiferent de nivelul de pregatire. Sistemele numerice au o comportare precisa, stabila în timp si
invariabila cu temperatura. Ca neajunsuri sunt de mentionat aparitia unei întârzieri în timp a
comenzii datorita esantionarii semnalelor si necesitatea unei mai bune pregatiri a proiectantului
unor astfel de sisteme.
Preview document



























Conținut arhivă zip
- Servomecanisme
- Lab_01.pdf
- Lab_02.pdf
- Lab_03.pdf
- Servo_Lab4_RevC.pdf
Alții au mai descărcat și

Capitolul 1. Introducere Un echipament este cu comandă numerică dacă instrucţiunile care permit punerea în funcţiune a maşinii sunt implementate...

ARGUMENT Tema atestatului: Executia instalatiilor electrice de iluminat si prize Mi-am ales aceasta tema deoarece mi sa parut un subiect...

Memoriu justificativ În funcţionarea instalaţiilor electrice se întâlnesc aparate electrice ( conectare şi deconectare ) cât şi aparate electrice...

I. Generalităţi Controlul unei maşini-unelte sau utilaj implică domenii cum ar fi tipul de acţionare, modul de control şi limitarea mişcărilor pe...

Principiul pornirii stea-triunghi Figura 2.2.1 Variaţia curentului şi momentului la pornirea stea-triunghi. Pentru motoare cu puterea mai mare de...

Preocuparea principala a tehnologiei este cresterea cu cheltuieli minime a calitati produselor si fiabilitati aparatelor si a instalatiilor.Pentru...

1.0 Clasificare Instalatiile electrice pentru iluminat dintr-o cladire se clasifica astfel: - instalatia electrica pentru iluminat normal, care...

Argument: Tema : Parti componente ale aparatelor electrice : bobine, miezuri magnetice, izolatii piese izolante si izolatori. Aparatele electrice...
Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

Introducere Circumstanţele în care ne găsim astăzi în domeniul microcontrolerelor şi-au avut începuturile în dezvoltarea tehnologiei circuitelor...

Capitolul 1 TENDINŢE ŞI DEZVOLTĂRI ÎN CONDUCEREA AUTOMATĂ ŞI ADAPTIVĂ A MAŞINILOR UNELTE În timp s-au conturat mai multe direcţii importante în...

1.Servodirectia Servodirectia are rolul de a facilita transmiterea miscarii volanului spre rotile masinii. Asigura un confort sporit in conducerea...

ARGUMENT Scurt istoric al dezvoltării motoarelor cu piston, în raport cu cerinţele evoluţiei tehnico-economice a societăţii în acest context...

Cap. 1Introducere 1.1.Destinația sistemului de direcție Sistemul de direcție deservește la modificarea direcției de deplasare a automobilului,...

SERVOMECANISME HIDRAULICE LA MASINILE UNELTE Servomecanismele sunt sisteme automate de reglare a pozitiei. Aceeasi denumire este utilizata in...

SERVOMECANISME MECANOHIDRAULICE 1. DEFINIRE ŞI CLASIFICARE Servomecanismele sunt sisteme automate de reglare a poziţiei. Aceeaşi denumire este...