
Extras din licență
1.1 Conceptul de „Robotică”
Robotica este acea parte a ştiinţei care se ocupă cu studiul operaţiilorumanoide şi se situează la frontiera mecanicii cu informatica, electrotehnica,electronica şi ştiinţa sistemelor şi calculatoarelor, termotehnică, hidraulică. Operaţiile umanoide sunt operaţiile efectuate de către om cu ajutorul braţelorşi picioarelor coordonate de către organele de simţ.
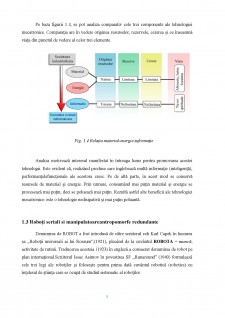
Robotica este aşadar un domeniu multidisciplinar a cărui componenţă este evidenţiată în Fig.1.1:
Fig. 1.1 Multidisciplinaritatea Roboticii
Istoria roboților incepe cu anul 1940, cand, datorita nevoii de miscare a unor recipient radioactive din spatii supuse iradierii, s-au realizat manipulatoare sincrone. Aceasta etapa din istoria robotilor tine pana la inceputul anilor 1960. Perioada de revolutie a robotilor are loc intre anii 1960-1980, datorita aplicabilitatilor diverse si fara precedent a robotilor in domeniul industrial. Perioada 1980-1990 este cunoscuta drept “deceniul robotilor industriali si a robotizarii productiei”. Incepand cu 1990 au aparut primii roboti inteligenti, marcand inceputul unei etape ce se afla in dezvoltare si in momentul de fata.
Tehnologiile care au stat la baza dezvoltarii roboticii sunt:
• Tehnologia electronica
• Tehnologia servomecanismelor
• Tehnica de calcul
În 1985 Simon Nof, editorul lucrării ,,Handbook of Industrial Robotics”, formulează legile roboticii aplicate:
• roboţii trebuie să înlocuiasca oamenii în locurile de muncă periculoase pentru aceştia;
• roboţii trebuie să înlocuiască oamenii în activităţi pe care aceştia nu doresc să le facă;
• roboţii ar trebui să înlocuiască oamenii în activităţi pe care ei le fac mai eficient;
Avansul tehnologic al roboticii industrial a avut ca si consecinta raspandirea din ce in ce mai mare a robotilor in diverse industrii, de la manufacturare si pana in cadrul sanatatii. Robotii au viteza si precizie cu mult superioare oricarui operator uman. Totodata, datorita utilizarii robotilor, costurile de operare, si cantitatea de rebuturi scad considerabil. De asemenea datorita structurii lor, robotii pot fi modificati ulterior, pentru a se adapta la conditii de lucru noi.
Principalele caracteristici ale robotilor industriali in care se investeste constant de catre producatori sunt: marirea incarcaturii utile, cresterea preciziei, marirea razei de actiune, imbunatatirea vitezei si acceleratiei, o comunicatie cat mai rapida cu echipamentele externe, caracteristici de siguranta mai bune si, nu in ultimul rând, un cost de operare cat mai scazut.
Un numar mare de oameni au inteles gresit aceasta expansiune a utilizarii robotilor industriali. Din punctul lor de vedere, robotii industriali au inlocuit operatorii umani si serviciile prestate de acestia, avand ca urmare cresterea somajului. Acest lucru nu este adevarat. Consecincele reale ale acestei expansiuni este chiar crearea de locuri de munca noi pentru operatorii umani de pe liniile de asamblare, in programarea si intretinerea robotilor industriali. Rolul robotului industrial este aceela de a inlocui operatorul uman intr-o ocupatie monotona si repetitive, in timp de operatorii pot fi reprofilati pe locuri de munca mai provocatoare din punct de vedere intelectual.
Robotii din ziua de azi sunt usor de utilizat, inteligenti si au un pret accesibil.
Bibliografie
[1]http://www.engr.ncsu.edu/mechatronics/what-mech.php
[2]https://en.wikipedia.org/wiki/Mechatronics
[3]http://www.nasa.gov/audience/forstudents/5-8/features/nasa-knows/what-is-robonaut-58.html
[4]https://en.wikipedia.org/wiki/Industrial_robot
[5]International Journal of Emerging Technology and Advanced Engineering, ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 5, May 2013
[6]http://www.kuka-robotics.com/usa/en/company/group/milestones/
[7]https://en.wikipedia.org/wiki/ABB_Group
[8]https://en.wikipedia.org/wiki/Festo
[9]http://thefutureofthings.com/5695-festos-bionic-arm/
[10]Manipulatoare si roboți, Comandă și control, Aurel Fratu, Ed. Univ. Transilvania, Brașov, 1999
[11]Prof.dr.ing. Nicolae VASILIU Prof.dr.ing. Daniela VASILIU ACŢIONĂRI HIDRAULICE ŞI PNEUMATICE, Bucuresi, 2004
[12]https://en.wikipedia.org/wiki/Programmable_logic_controller
[13]https://en.wikipedia.org/wiki/Microcontroller
[14]Design de sisteme integrate, Steve Heath, Newres, a doua ediție, 2003
[15]http://www.open-electronics.org/arduino-as-a-programmable-logic-controller-plc/
[16]http://www.afag.com/fileadmin/user_upload/afag/Handlingmodule_pneumatisch/PDF-Files/OI_GM20_GM20-RM16_GM20-RM25.pdf
[17]http://www.afag.com/fileadmin/user_upload/afag/Handlingmodule_pneumatisch/PDF-Files/OI_LM32.pdf
[18]http://www.afag.com/fileadmin/user_upload/afag/Handlingmodule_pneumatisch/PDF-Files/OI_LM20_LM25.pdf
[19]https://ro.wikipedia.org/wiki/Tranzistor
[20]S. D. Anghel, Bazele electronicii analogice și digitale, Presa Universitară Clujeană, 2007
[21]https://www.robofun.ro/tranzistor-tip122-brick?search=tranzistor
[22]https://www.arduino.cc/en/Guide/Introduction
[23]https://www.arduino.cc/en/Main/ArduinoBoardMega2560
[24] https://proiectxi.wikispaces.com/file/view/distribuitoare.pdf
[25] https://en.wikipedia.org/wiki/SketchUp
Preview document




































































Conținut arhivă zip
- Manipulator.docx
Alții au mai descărcat și

Mecatronica este un concept japonez care datează din anii 1970 și care poate fi definit ca aplicarea electronicii și tehnologiei calculatoarelor cu...

CAPITOLUL 1 Modelare si strategii de conducere a manipulatoarelor robotice 1.1. Introducere în problematica robotilor industriali Notiunea de...

Automatizarea proceselor de productie a insemnat o etapa importanta in dezvoltarea tehnologiei si a dus la insemnate cresteri ale productivitatii...

Rezumat Ȋn lucrarea de faţă este prezentat un robot industrial cu mişcări de rotaţie şi translaţie comandat de un controler logic programabil....

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

CAPITOLUL I Masuri pregatitoare pentru receptionarea porumbului stiuleti I.1. Masuri tehnico-organizatoare Pentru organizarea si desfasurilor in...
CAPITOLUL 1 Modelare si strategii de conducere a manipulatoarelor robotice 1.1. Introducere în problematica robotilor industriali Notiunea de...

Lista figurilor Figura 4.1: Reprezentarea cotelor de piaţă deţinute de principalii competitori 72 Figura 4.2: Evoluţia titlurilor Amonil în...

Abstract Manipulation in comercial purpose exists from the beginings of the world. Begining to be more and more efficacious when the sublime...

Argument Obiectul. În lucrarea de faţă ne propunem să punem în discuţie unele aspecte ale manipulării prin informaţie: definirea conceptului,...

Introducere Prin intermediul lucrării de faţă, Manipularea prin talk-show-ul politic, mi-am propus să descriu, cu ajutorul lucrărilor de...

PUBLICITATEA CA MIJLOC DE MANIPULARE MOTTO: ,,Descoperiţi mijloacele de convingere disponibile într-un caz” (Aristotel) I. OMUL ŞI MANIPULAREA...

Introducere Este evident faptul că noi toţi experimentăm această lume folosindu-ne de anumite “strategii”. Lăsăm în exterior să se vadă un anume...