Extras din notiță
1. Structura generală a unui sistem de conducere automată.
Structura principială a unui sistemul cu conducere automată (SCA) rezulta prin interconectarea celor două subsisteme,
- subsistemul condus sau procesul condus abreviat PC (se desfasoara in instalația tehnologică), - subsistemul de conducere, care este denumit dispozitiv de conducere (DC). si este prezentată în fig. de mai jos. Interconectarea DC-PC se realizează prin intermediul perifericelor de proces:
- perifericele de interconectare tradițională DC-PC: echipamentele de intervenție în proces sau elementele de execuție (EE) și echipamentele de măsură (EM); atât funcțional cât și în caracterizare matematică aceste periferice sunt parte a procesului condus (instalației tehnologice);
- perifericele de conversie a naturii informației prelucrate în DC: convertoarele analog-numerice (CAN) și numeric-analogice (CNA); atât funcțional cât și în caracterizare matematică aceste periferice sunt parte a DC.
Funcționalitatea unui SCA este determinată de realizarea obiectivelor conducerii. În acest cadru DC trebuie să asigure realizarea corelată a următoarelor categorii de sarcini de conducere:
- Elaborarea mărimilor de comandă, văzute ca evenimente cu timp discret - secvențiale și combinaționale - necesare conducerii (Comanda sistemului).
- Elaborarea comenzilor legate de reglare a parametrilor procesului (partea de Reglare a sistemului).
- Realizarea unor funcții suplimentare, obligatorii pentru funcționalitatea SCA:
- Interfațarea cu alte sisteme de conducere;
- Supravegherea funcționării și Diagnostizarea defectelor din system în vederea asigurării siguranței în functionarea PC și SCA;
- Monitorizarea funcționării SCA ș.a.
Sarcinile de conducere se asigura prin actiuni de conducere:
- Acțiunile de tip comandă (C): elaborarea de comenzi logice - combinaționale și secvențiale - care se întâlnesc in toate acțiunile de conducere; ele pot fi și specifice unor anumite tipuri de procese (de exemplu semaforizarea unei intersecții); studiul teoretic și aplicativ al unor astfel de acțiuni se face în cadrul disciplinelor de "sisteme cu evenimente discrete";
- Acțiuni de tip reglare (R): reglarea (controlul) parametrilor tehnologici (temperatură, presiune, viteză, poziție, nivel,
concentrație ); - prin astfel de acțiuni se "controlează" evoluția mărimilor caracteristice ale unui proces dinamic - obișnuit cu variație continuală în timp; acțiunea urmărește asigurarea evoluției dorite pentru aceste mărimi;
- Acțiuni de de tip supervizare (supraveghere) (S) a funcționării sigure, de detectare a defecțiunilor și de monitorizare a desfășurării procesului (M) : - urmărirea și monitorizarea desfășurării procesului (sistemului), detectarea defecțiunilor și înlăturarea acestora prin sistemele de protecție diagnoză, asigurarea redundanței conducerii în vederea funcționării sigure a procesului.
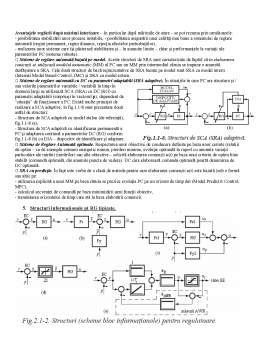
2. Detalierea functiilor de conducere ale DC aferent unui SRA complex.
Structura unui DC complex dedicat conducerii poate fi reprezentata sub forma schemei bloc din fig. 1.1-2 (marcat si cu 2.2-3). Schema are la bază logica realizării funcțiilor DC cu utilizarea unor “echipamente / module individuale” analogice sau numerice. In acest context fiecare funcție este realizată de câte un echipament / modul functional, care poartă aceeași denumire cu funcția realizată.
La realizarea soluțiilor de conducere cu “echipamente numerice” funcțiile menționate pot fi implementate în diferite maniere, de exemplu prin module software (programele se scriu in C++, in limbaje dedicate pentru conducere sau chiar in matlab.
Observatie: In fig. 1.1-2 funcțiile realizate și - corespunzător - blocurile funcționale, numerotate de la (1) la (13), sunt detaliate atât pentru partea de “comenzi logice” (CL) asigurate de către DC cât și pe partea de funcții de “reglare” (R) asigurate de către DC (obiectivul cursului). Relativ la fiecare funcție evidențiată, se fac câteva scurte precizari.
1. Interfațarea SCA cu un sistem de conducere ierarhic superior. În construcțîa oricărui DC funcția este permanent prezentă; în cazurile mai simple “sistemul ierarhic superior” poate fi chiar operatorul uman.
2. Selectarea regimului de funcționare a DC/SCA. În practică această funcție este obligatorie; regimuri de funcționare frecvent implementate în cadrul unui DC sunt următoarele:
- regim de conducere “automat”;
- regim de conducere “manual”;
- regim de “verificări” și “reglaje locale” în cadrul DC și PC (puneri
- în funcțiune, revizii ș.a.m.d.);
- alte regimuri “semnificative” pentru funcționarea PC.
3. Asigurarea prescrierii/programării evoluției dorite a PC. Se asigură fixarea (evolutiei in timp a) referințelor (referințe, prescrieri) necesare realizării obiectivelor conducerii.
4. Realizarea și coordonarea acțiunilor de conducere în regim de funcționare “manual”. În acest regim DC devine o “prelungire” sau un “aplificator” al acțiunilor unui operator uman; funcțiile de coordonare a diverselor acțiuni și de supraveghere a funcționării sigure a PC sunt în continuare preluate de către DC.
5. Realizarea și coordonarea acțiunilor de conducere în regim “automat”. La acest nivel se realizeaza legile de reglare și toate functiile suplimentare solicitate de reglarea procesului (prin regulatoarele DC) s.a..
6. Interfațarea DC-PC in sensul “către proces”, prin elementele de intervenție (EI) în proces sau organe de reglare (OR) în vederea transmiterii comenzilor.
7. Interfața PC-DC “dinspre proces” - către DC în vederea obținerii informațiilor legate de desfășurarea PC; informația despre starea si evoluția procesului este recepționată prin intermediul traductoarelor primare (Tp); semnale captate trebuie apoi concertite si adaptate la specificul echipamentelor ce compun DC. aceste adaptări sunt de “natură inversă” ca în cazul elementelor de execuție.
8. Calculul unor mărimi intermediare și a informațiilor necesare în conducere; evaluarea stărilor procesului. In cazurile PC mai complexe sau instabile, marimile dupa care se realizeaza conducerea sunt determinata pe baza unor masurari complexe, a mai multori marimi. Astfel de situatii duc la necesitatea unor senzori inzestrati cu inteligenta al carui studiu si realizare constituie un capitol special al tehnicii masurarilor si automaticii.
9. Supravegherea derulării procesului si asigurarea funcționării sigure a PC / SCA la apariția unor “situații / fenomene anormale”. Situațiile anormale din funcționarea PC (SCA) pot conduce (de exemplu) la avarii care trebuie evitate.
Situațiile de funcționare “normală” și “anormală” ale diferitelor aplicații de conducere sunt diferite și se tratează de la caz la caz.
10. Semnalizarea stării PC și a funcționării SCA în ansamblu: semnalizări luminoase, acustice sau de altă natură prin care operatorul uman care supraveghează derularea PC va afla dacă:
- procesul / sistemul evoluează în parametrii normali (de ex. cu o lumină verde);
- procesul / sistemul evoluează în regimuri speciale (de ex. cu o lumină galbenă intermitentă);
- procesul (anumite mărimi sau parametrii ai acestuia) au atins nivele de avertizare sau chiar periculoase pentru desfășurarea procesului (de ex. cu o lumină roșie sau roșie intermitentă). Remarca: încărcarea excesivă, nerațională a unui DC cu semnalizări (adeseori inutile) devine deranjantă pentru operatorul care urmărește derularea PC.
11. Indicarea, înregistrarea, protocolarea, teletransmiterea informațiilor relative la desfășurarea PC, a SCA. Inregistrarea și protocolarea informațiilor privind derularea PC / SCA pot fi necesare din diferite motive, una din ele fiind - de exemplu - aceea legată de “reconstituirea post-avarie a istoriei/ evoluției trecute a PC sau SCA ”.
12. Elaborarea comenzilor logice pe baza unor condiționări de tip combinaționale și secvențiale. Derularea procesului poate fi condiționată de evoluția în timp (programabile din prealabil) ale unor marimi din cadrul PC sau poate fi condiționată de “realizarea” concomitentă a unor condiții de functionare strict impuse.
13. Alimentarea DC și SCA cu agenții energetici care asigură funcționarea DC și a SCA (electrică, pneumatică, hidraulică ș.a.):. alimentarea cu energie electrică (de ex. 220 V c.a.), energie hidraulică (ulei sub presiune), aer comprimat.
IMPORTANT. În cadrul acestui curs sunt prezentate aspecte legate de dezvoltarea structurilor Sistemelor de Reglare Automată (SRA) și a algoritmurilor de reglare automată a proceselor.
Preview document





















Conținut arhivă zip
- TRA - teorie examen.docx
Alții au mai descărcat și

CAPITOLUL 1 SISTEME DE REGLARE AUTOMATĂ 1.1. Noțiuni introductive Sistemele de reglare automată (SRA) sau pe scurt, automatizarea, sunt des...

CAPITOLUL I SISTEME, MODELE, SIMULARE În matematică, termenul „simulare” a fost folosit pentru prima dată de către John von Neumann şi S. Ulam...

1.Prezentarea proiectului Tema reprezintă proiectarea unui sistem de reglare automată (SRA) a turației unui motor de curent continuu cu excitație...

Sistem de reglare automat al turatiei unui motor de curent continuu cu excitatie independenta cu regulatoare conventionale PID. II. Schema de...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...


În conceptia actuala a teoriei sistemelor, rezolvarea problemelor de conducere a proceselor tehnologice presupune parcurgerea câtorva etape cum...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...