Cuprins
- Cap 1: Prezentarea celulei
- Cap 2: Prezentarea robotului folosit in aplicatie
- Cap3: Prezentarea generala a aplicatiei
- Cap 4: Prezentarea celulei asamblate
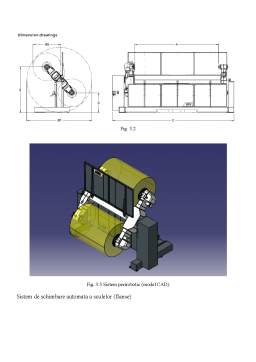
- Cap 5: Desen de executie flanse
Extras din proiect
Capitolul 1
Prezentarea celulei
Necesitatea implementării roboților industriali în aplicații de prelucrare prin așchiere
- automatizarea unor operatii efectuate traditional manual
- acoperirea unor domenii de activitate cu risc crescut de accidente
- cost mai redus fata de masinile-unelte cu comanda numerica
- posibilitatea reconfigurarii aplicatiei si extinderii spatiului de lucru
- manevrabilitate foarte buna pentru pozitionarea si orientarea efectorului,
- posibitatate de programare on-line / off-line,
- capacitate ridicata de implementare a sistemelor senzoriale pentru monitorizarea functionarii / comanda adaptiva
Clasificarea operațiilor de prelucrare robotizată cu scule cu antrenare proprie în funcție de puterea de așchiere necesar a fi dezvoltată
- Prima condiție pentru ca un sistem tehnologic să fie capabil de a realiza aplicațiile pentru care este conceput este ca acesta să se încadreze în parametrii funcționali caracteristici pe întreaga perioadă în care este supus obiectului activității sale. În acest sens, luând în considerare specificul aplicațiilor de prelucrare prin așchiere cu scule cu antrenare proprie, rezultă că atât structura cât și caracteristicile funcționale ale sistemelor robotizate trebuie analizate în concordanță cu ansamblul factorilor de influență ce condiționează exploatarea specifică a acestora.
- Din acest punct de vedere specificul aplicațiilor robotizate de realizare a operațiilor de prelucrare prin așchiere permite identificarea ca prim factor major de influență a nivelului solicitărilor induse de procesul tehnologic (sistemul de forțe ce apare în zona de contact sculă-piesă), un rol deosebit de important în analiza corectă a comportării in exploatare a sistemelor robotice reprezentandu-l identificarea modului in care aceste solicitari condiționează integrarea eficientă exploatarea optimala a roboților industriali integrati în astfel de aplicații.
- Avand astfel in vedere faptul ca principalul factori de influența în configurarea optimă a aplicațiilor robotizate de prelucrare prin așchiere îl reprezinta specificul operatiilor tehnologice de prelucrare prin așchiere posibil a fi realizate în cadrul unei anumite aplicații robotizate si nivelul puterii de aschiere necesare realizarii acestora. Din acest punct de vedere procesele de prelucrare prin așchiere posibil a fi realizate în cadrul aplicațiilor robotizate pot fi împărțite în trei categorii majore:
- Operații de prelucrare ce necesită puteri mici de așchiere
- Operații de prelucrare ce necesită puteri medii de așchiere
- Operații de prelucrare ce necesită puteri mari de așchiere
Preview document




















Conținut arhivă zip
- Conceptia si exploatarea sistemelor de productie robotizate.docx
Alții au mai descărcat și

Capitolul 1 1.1 Prezentare generala a tipului de aplicatie de la licenta Paletizarea reprezinta operatia de dispunere voluminca ordonata, in plan...

3.1.Accesul mijloacelor si al personalului pentru interventie in caz de incendiu se asigura in permanenta la toate: a) constructia unitatii cu...

Masuratorile directe de aceeasi precizie, reprezinta un volum important de lucrari, executate pe teren în cadrul activitatilor geodezice,...

Te-ar putea interesa și

1.1. NOTIUNI SI CONCEPTE FUNDAMENTALE 1.1.1. Observaţii preliminare Timp de mai multe secole oamenii au avut ca o preocupare principală...

1. PROCESUL TEHNOLOGIC Tehnologia este stiinta tehnico-aplicativa care studiaza operatiile si procesele industriale de transformare a materiilor...