
Extras din proiect
METODA FACTORULUI DE AMPLIFICARE PENTRU SISTEME LINIARE
1. FORMULAREA METODEI FACTORULUI DE AMPLIFICARE VARIABIL
Metoda factorului de amplificare variabil, conceputa de Julius Tou si prezentata in cartea “J. Tou, Modern control theory, Mc Graw Hill, 1968”, este o metoda de sinteza a algoritmilor numerici de conducere pentru asigurarea unor performante in circuit inchis.
Ideea de baza consta in considerarea, la fiecare pas, a dependentei dintre intrarea si iesirea legii de conducere ca fiind de tip proportional cu un factor a carui valoare depinde de pasul de evolutie.
O evolutie dorita a sistemului in circuit inchis este exprimata ca un sistem algebric de ecuatii, avand ca necunoscute acele valori ale factorilor de amplificare.
Daca se impune o comportare in circuit inchis de tip durata finite a regimului tranzitoriu, atunci pentru sisteme liniare , se obtin exact aceleasi solutii ca si in cazul aplicarii metodei dead beat dupa stare.
Avantajul deosebit al metodei factorului de amplificare variabil consta in aceea ca se poate aplica si la sisteme neliniare unde metodele bazate pe transformarea Z nu au aplicabilitate.
Un dezavantaj major al metodei factorului de amplificare variabil constituie dificultatea rezolvarii sistemului algebric de ecuatii.
Se considera un sistem numeric de reglare automata cu algoritm numeric de reglare automata liniar comandat prin eroare, reprezentat in variatii fata de un regim cu schema bloc din figura urmatoare:
Figura 1
Se considera partea fixa a sistemului liniara, descrisa prin functia de transfer , comandata printr-un extrapolator de ordinal zero cu perioada de esantionare T.
Marimea reglata este iar marimea de intrare in elemental de executie este notata prin
In fiecare moment de exantionare, t=jT, j , regulatorul discret primeste sirul de valori
(1)
Si genereaza comenzile , prin intermediul functiei de transfer
(2)
Comenzi ce sunt convertite in semnalul continual, constant pe portiuni,
= , t (3)
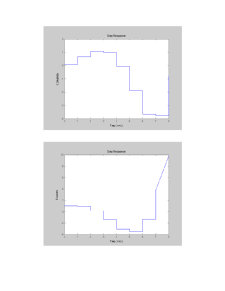
Trebuie sintetizata legea de reglare astfel incat in momentele de esantionare sa fie satisfacute performantele:
A. Eroare stationara de pozitie nula :
B. Durata finita a regimului tranzitoriu : finit,
C. Timp de crestere minim
D. Raspuns la intrare treapta aperiodic ( daca este posibil ).
2. STRUCTURI ECHIVALENTE PENTRU APLICAREA METODEI FACTORULUI DE AMPLIFICARE VARIABIL
Metoda factorului de amplificare variabil consta in considerarea regulatorului discret ca fiind un element proportional cu factorul de proportionalitate ce se mentine constant pe parcursul unui interval de esantionare pentru dar valoarea sa este diferita de la un interval la altul.
In felul acesta dependenta in comeniul Z
(4)
Este echivalenta ca fiind o relatie de proportionalitate intre sirul si sirul de forma,
= (5)
Cu aceasta echivalare, schema bloc din fig1 va avea forma urmatoare, aparand astfel ca un sistem variabil in timp.
Figura 2
Conform acestei echivalari, eroarea la fiecare moment de timp t=jT, este inmultita cu factorul si se obtine numarul ce este apoi convertit in semnalul continual constant pe portiuni,
=[ , (6)
Comportarea sistemului fizic, intre eroarea e(t) si marimea de executie , este exprimat echivalent si prin urmatoarea descriere:
Valoarea esantionata, , la momentul de timp t=jT, este mai intai transformata intr-un semnal continual m(t) printr-un process de extrapolare de ordinul zero,
m(t)= , (7)
si apoi se genereaza marimea de executie, sub forma semnalului , prin inmultirea semnalului m(t) cu un factor de proportionalitate , deci:
= m(t), (8)
Aceasta forma echivalenta a comportarii sistemului fizic se poate ilustra grafic prin schema bloc ding fig3 in care s-a inversat pozitia elementului proportional cu cea a extrapolatorului.
Preview document











Conținut arhivă zip
- marius.mdl
- marius1.m
- Rezpr.doc
- teorie.doc
Alții au mai descărcat și

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

Elementele de executie sunt componente ale sistemelor automate care primesc la intrare semnale de mica putere de la blocul de conducere si...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...