Extras din proiect
Sa se proiecteze comanda automata a unui manipulator cu doua grade de mobilitate pentru deservirea a trei masini-unelete.
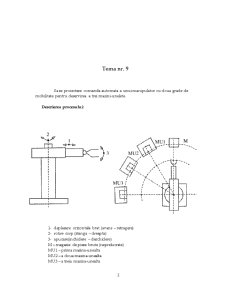
Descrierea procesului:
1- deplasare orizontala brat (avans – retragere)
2- rotire corp (stanga – dreapta)
3- apucare(inchidere – deschidere)
M – magazie de piese brute (neprelucrate)
MU1 – prima masina-unealta
MU2 – a doua masina-unealta
MU3 – a treia masina-unealta
Pozitia initiala: brat retras, rotit la M si cu apucatorul deschis
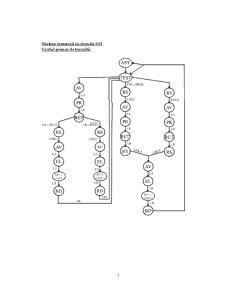
Modul de lucru:
Piesele brute extrase de la M se duc fie la MU1, fie la MU2, pentru o prima prelucrare. Dupa aceasta prima prelucrare , piesele se extrag si se duc la MU3 pentru prelucrarea finala.
Eliminarea pieselor prelucrate din MU3 se face automat, fara interventia manipulatorului.
La comanda START, data de catre operator, bratul alimenteaza MU1 sau MU2 , in functie de masina care este libera in acest moment ( testarea se face cu prrioritate pentru MU1), apoi transfera piesa din MU1 catre MU2 sau in MU3 (dupa ce MU1 sau MU2 a efectuat prelucrarea), apoi realimenteaza masina evacuata si apoi transfera piesa prelucrata din cealalta masina in MU3 (cu confirmarea ca in MU3 nu se mai afla piesa prelucrata la aceasta masina). Ciclul continua prin astfel de transferuri succesive.
O operatie de alimentare a unei masini-unelte are loc astfel: avans brat (spre M), prindere piesa, retragere, rotire la masina respectiva, avans eliberare piesa, retragere si comanda initierii ciclului de prelucrare la masina deservita. O operatie de transfer a piesei intre doua masini-unelte are loc in mod asemanator.
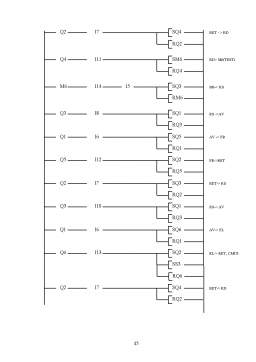
Definirea variabilelor primare
Variabile primare de intrare:
Simbol Descriere
P Buton de comanda a ciclului automat de functionare
O Buton de oprire normala a procesului
STOP Buton de oprire avarie
SRL Comutator de selectare regin de lucru(„1” – Automat)
PP Confirmare prezenta piesa pe post preluare in magazie
MU1L Masina unealta 1 libera
MU2L Masina unealta 2 libera
MU3L Masina unealta 3 libera
LA Confirmare limita la avans
LR Confirmare limita la retragere
LMU1 Confirmare limita la MU1
LMU2 Confirmare limita la MU2
LMU3 Confirmare limita la MU3
LM Confirmare limita la magazia de piese
LP Confirmare piesa stransa la apucator
LE Confirmare piesa eliberata
TO1 Confirmare terminare operatie la MU1
TO2 Confirmare terminare operatie la MU2
Preview document












































Conținut arhivă zip
- Comanda Automata a unui Manipulator cu Doua Grade de Mobilitate pentru Deservirea a Trei Masini-Unelete.doc
Te-ar putea interesa și

. Definitia robotului si a robotului industrial Robotul este un sistem cu functionarea automata, adaptabila prin programare conditiilor mediului...

Principalele principii care stau la baza unui system flexibil de productie sunt: principiul flexibilitatii, principiul integrarii, principiul...