Extras din proiect
Din punct de vedere constructiv MRIP 0.2 este un minirobot articulat alcătuit dintr-o bază staţionară şi patru elemente mobile: corp(trunchi sau turelă), antebraţ(braţ1), braţ(braţ2) şi mână(gripper), interconectate într-un lană cinematic serial deschis prin intermediul unor articulaţii de rotaţie.
În figura 1 se prezintă componentele structurale de bază ale minirobotului MRIP 0.2.
Fig.1 Minirobotul MRIP 0.2
MRIP 0.2 are cinci grade de libertate, determinate din asocierea segment-articulaţie, notate după cum urmează:
- grad de libertate 1 : corp + articulaţie trunchi;
- grad de libertate 2: antebraţ + articulaţie umăr;
- grad de libertate 3 : braţ + articulaţie cot;
- grad de libertate 4: mână + articulaţie de flexare(pitch) a mâinii;
- grad de libertate 5: mână + articulaţie de rotaţie(roll) a mâinii;
După cum se poate observa, articulaţia mâinii este realizată printr-un mecanism diferenţial de roţi care permite orientarea mâinii prin mişcări de flexare şi rotaţie de tipul pitch(P) şi roll(R), ca în figura 2.
Cele cinci grade de libertate propriu-zise, definite anterior, se adaugă un al şaselea semigrad de libertate, acela de închidere/deschidere a mâinii pentru asigurarea funcţiei de prindere de obiecte.
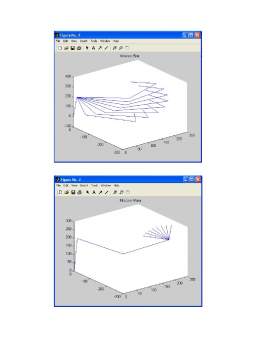
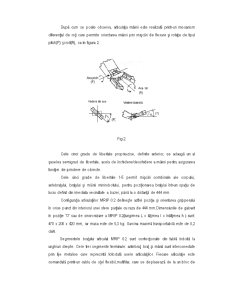
Cele cinci grade de libertate 1-5 permit mişcări combinate ale corpului, antebraţului, braţului şi mâinii minirobotului, pentru poziţionarea braţului într-un spaţiu de lucru definit din imediata vecinătate a bazei, până la o distanţă de 444 mm.
Configuraţia articulaţiilor MRIP 0.2 defineşte astfel poziţia şi orientarea gripperului în orice punct din interiorul unei sfere parţiale cu raza de 444 mm.Dimensiunile de gabarit în poziţie “0” sau de sincronizare a MRIP 0.2(lungimea L x lăţimea l x înălţimea h ) sunt: 470 x 200 x 420 mm, iar masa este de 5,3 kg. Sarcina maximă transportabilă este de 0,2 daN.
Segmentele braţului articulat MRIP 0.2 sunt confecţionate din tablă îndoită la unghiuri drepte. Cele trei segmente terminale: antebraţ, braţ şi mână sunt interconectate
Preview document






















Conținut arhivă zip
- Determinarea si Testarea Modelului Cinematic Mrip.doc