Cuprins
- CUPRINS
- -Pag.1 Argument
- -Pag.2-24 Continutul propriu-zis
- -Pag.24-28 Anexe
- -Pag.29 Bibliografie
Extras din proiect
4.1Introducere
ELEMENTE CONSTRUCTIVE SI DE CALCUL ALE ROBOŢILOR INDUSTRIALI
Construcţia RI trebuie sa răspundă cerinţelor funcţionale de realizare a cinematicii impuse (precizia de poziţionare, viteza de deplasare), a preluării sarcinii in condiţii dinamice, a unei bune fiabilitatea, a lucrului,in medii nocive pentru om. Aceste cerinţe determina folosirea unor elemente mecanice care introduc in locul frecării de alunecare frecarea de rostogolire si care permit totodată si o rigiditate mai buna, pe linga forte de frecare de doua-trei ori mai mici. Creşterea rigidităţii in lanţurile cinematice se poate obţine prin eliminarea jocurilor si introducerea pretensionărilor la transmisii. Ea favorizează rapiditatea comenzilor si a acţionarilor si precizia de poziţionare. De asemenea, condiţiile arătate mai înainte impun construcţii robuste, dar cu o masa proprie (in special a elementelor periferice) cit mai redusa. In mare măsura soluţiile constructive vor depinde de mărimea sarcinii manipulate, de tipul acţionarii si de amplasarea motoarelor de antrenare.
Din punct de vedere constructiv si funcţional RI se pot considera formaţi din trei parti principale : subansamblul cine¬matic principal (SCP), sistemul de orientare (SO) si dispozitivul de apucare (DA)
sau mina mecanica (MM).In general SCP generează traiectoria spaţiala a centrului de greutate al obiectului de lucru (OL), iar SO realizează orientarea OL fata de un sistem de axe de referinţa solidar cu ultimul element al SCP. SO se interpune intre SCP si DA si realizează unul pana la trei grade de libertate, de obicei rotaţii. DA permite obţinerea funcţiei de prindere desprindere a OL. In figura 4.1 este dat un exemplu pentru un RI cu 6 grade de libertate.SCP realizeaz㬠trei grade de libertate (vx, vz si «2), iar Fig. 4.1. SO trei grade de libertate (ωI,ωII,ωIII).Din punct de vedere funcţional, SCP poate cuprinde: batiu (v. § 4.2.1 subansamblul pentru realizarea rotaţiei principale in jurul axei verticale Oz (v. §4.2.2), subansambluri pentru realizarea RI cu articulaţii (v.§4.2. si subansambluri pentru realizarea miscarilor de translaţie (v. § 4.2.4).
4.2. Construcţia subansamblului cinematic principal
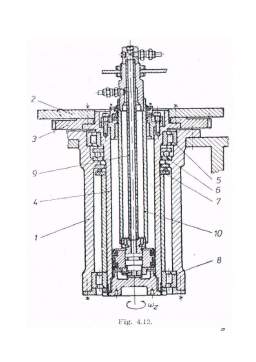
4.2.1. Batiu
SCP împreuna cu agregatele si subansamblurile care asigura antrenare si funcţionarea RI se montează pe un batiu fix sau mobil,după cum RI est fixat la sol sau este deplasabil pe sol.
Constructiv, batiul fix poate fi de tip: placa, masa si de tip ,,C" (fig. 4.2 b). Batiul de tip placa, varianta cea mai simpla de susţinere a SCP se fixează fundaţie cu modalitati cunoscute din celelalte domenii ale construcţiei de masini.Batiul de tip masa, pe linga rolul de susţinere a SCP si a altor agregat poate fi folosit ca rezervor de ulei, in cazul unui agregat de acţionare hidraulica. Avantajul acestei forme este rigiditatea mare datorata robusteţii contructive.Batiul de tip ,,C" se compune dintr-un batiu de tip masa pe care: se aseaza un cadru, construcţia rezultanta având forma literei ,,C" si caracterizându-se printr-o rigiditate sporita. Aceasta forma de batiu permite înlocuirea lagaruirii in consola a subansamblului ce realizează rotaţia principala in jurul unei axe verticale Oz cu o lagaruire la capete, prin utilizarea partii superi-
Subansamblu cinematic principal
de apucare
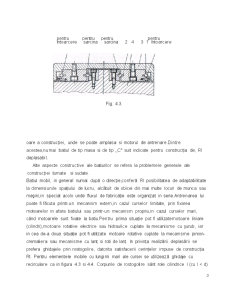
pentru pentru pentru pentru
întoarcere sarcina sarcina 2 4 3 1 întoarcere
Fig. 4.3.
oare a construcţiei, unde se poate amplasa si motorul de antrenare.Dintre acestea,numai batiul de tip masa si de tip ,,C" suit indicate pentru construcţia de, RI deplasabil.
Alte aspecte constructive ale batiurilor se refera la problemele generale ale construcţiei turnate si sudate.
Preview document





























Conținut arhivă zip
- Elemente Constructive ale Robotilor industriali.doc
Alții au mai descărcat și

Argument Ştiinţa este un ansamblu de cunoştinţe abstracte şi generale, fixate într-un sistem coerent obţinut cu ajutorul unor metode adecvate şi...

Tema proiectului Sa se proiecteze un sistem de actionare cu motor electric pas cu pas pentru mecanismul prezentat in figura 1 Fig.1 Unde MPP -...

Introducere Dispozitivele de apucare (DA) reprezintă veriga finală din alcătuirea unui robot industrial, a manipulatoarelor şi a altor...

NOŢIUNI DE AUTOMATIZAREA, CIBERNETIZAREA ŞI ROBOTIZAREA PROCESELOR TEHNOLOGICE CUPRINS 1. Automatizarea proceselor tehnologice 2....

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

Elementele de executie sunt componente ale sistemelor automate care primesc la intrare semnale de mica putere de la blocul de conducere si...

1. CONVERTOARE NUMERIC-ANALOGICE Convertoarele de tip numeric-analogic sunt dispozitive care au rolul de a transforma informaţiile date sub formă...

Capitolul 1 INTRODUCERE ÎN STUDIUL SISTEMELOR AUTOMATE 1.1. Concepte, metode şi principii Ramura ştiinţei care se ocupă cu studiul metodelor şi...
Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

1.Introducere Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte...

INTRODUCERE Tendinţa actualei etape de dezvoltare şi modernizare a industriei constructoare de maşini o constituie crearea de maşini, agregate şi...

TEMA DE PROIECTARE Sa se proiecteze o mâna mecanica cu mecanism biela manivela si actionare hidraulica cu motor liniar cu urmatoarele date: a)...

DATE DE PROIECT Lungimea cursei piulitei: c= 180 [mm] Turatia la iesire: n= 8 [rot/min] Pasul filetului: p= 6 [mm] Sarcina axiala: F= 750 [N]...

1. ROBOTI INDUSTRIALI - INTRODUCERE Robotica este un domeniu al ştiinţei şi tehnicii relativ nou, cu o rapidă dezvoltare, legat de realizarea şi...

TEMA Sa se proiecteze un dispozitiv actionat electro-pneumatic de impingere a unui numar de 4 piese dintr-o magazie gravitationala,stiind ca...

TEMA PROIECT: Sa se proiecteze mecanismul de realizare a miscarii de rotatie dupa axa OZ din cadrul subansamblului cinematic principal ce...