
Extras din proiect
INTRODUCERE
În cursul ultimelor două decenii, cercetatorii in roboti mobili au avut de aface cu diferite metode de planificare.In majoritatea cazurilor ,scopul principal este de a gasi metode cai libere de coliziune;care sa indeplineasca configuratiile initiale si finale pentru a finalize misiunea.Unii cercetatori au propus metode in care configuratia robotului este perfect cunoscuta in fiecare clipa in timpul etapelor de planificare si navigatie.(Moreno si Dapena 2003).Acest lucru nu este intotdeauna posibil.
Confruntarea cu incertitudinea ,in stadiul d eplanificare,este esentiala atunci cand valorile erorilor de pozitie se apropie de pragurile premise pentru misiune.Planurile bazate pe modele geometrice ,presupunand incertitudine nula,sunt clar insuficiente cand un robot mobil trebuie sa coexiste cu oameni sau alte situatii diferite.Astfel,utilizarea de planificari,care nu are de a face in mod explicit cu incertitudinea,este limitata la situatii simple,in cazul in care erorile sunt mai putine decat pragurile impuse pentru a realize misiunile.(Bouilly si Simeon 1996).In general, cerintele de baza , pentru navigarea autonoma a unui robot mobil sunt recunoastere.
(Nakamura, 1991, Haralick & Shapiro).Estimarea locatiei si capabilitatea corectiei sunt practice indispensabile pentru ca un robot mobil autonom sa si execute efficient sarcinile date.Exista multi factori implicati in obtinerea informatiilor referitoare la localizarea exacta in timp ce robotul mobil se afla in miscare.(Sim si Dudek).Pentru a obtine date fiabile si reale despre localizare,senzorii tehnici de fuziune au fost de asemenea dezvoltati.Atunci cand o camera CCD este utilizata in conditii de iluminare bune ,anumite tipare sau forme de obiecte sunt ,de asemenea eficiente pentru stabilirea amplasarii.( Han et.al, 1999,
Segvic & Ribaric, 2001).Similar,cand un robot mobil se misca intr-o cladire, peretii,usile si marginile pot fi utilizate pentru estimarea pozitiei (Betke, 1994 David, 1989).Cele mai multe cercetari (Choset, 2001, Sanisa, 2001, Philippe & Colle, 2001) se concentreaza pe navigatia interioara a unui robot mobil intr un mediu foarte bine structurat.Cu alte cuvinte,usile si marginile coridorului sunt utilizate pentru a estima locatia curenta a robotului mobil.Cu toate astea, in cazuri precum cele in care un robot mobil navigheaza sub o apa adanca sau intr-o padure (Kim, et.al, 2001) nu exista repere care pot fi utilizate pentru a determina locatia.
Această lucrare ia în considerare situaţiile în care un robot mobil şi un om care merge coexistă într-un mediu inteligent structurat, cum ar fi linia de asamblare într-o fabrică. În aceste cazuri, nu se pot utiliza orice repere sau caracteristici speciale cunoscute a priori (Lallet & Lacroix, 1998, Olson, 2000) pentru a localiza robot mobil.. Singurul lucru care poate fi utilizat pentru localizarea este informaţia cu privire la un om capturat de un aparat de fotografiat CCD ataşat în partea de sus a robotului mobil. Şi un mediu inteligent este utilizat în scopul de a rezolva aceste probleme; a fost dezvoltat un nou sistem de localizare a unui robot mobil utilizând informaţiile asupra obiectului în mişcare. Această situaţie ar putea fi considerat ca fiind inversul de urmărire a unui obiect necunoscut care se deplasează cu ajutorul unui robot de navigaţie cu o camera a cărui locaţie este precis calibrata şi stocata tot timpul. Problema de urmărire a fost deja abordata în mai multe cercetari (Nair & Aggarwal, 1989).
Pentru analiza cantitativa a acestei abordari, incertitudinea pozitiei unui robot mobil este reprezentata d eun ellipsoid care arata incertitudinea in mod cantitativ.Traiectoria obiectului in miscare se transforma in imagini cadru si este reprezentata ca o ecuatie geometrica folosita pentru procesul de filtrare (Kalman, 1960, Sorenson, 1966).Si un robot mobil coopereaza cu mai multi senzori inteligenti care sunt distribuiti in mediu..Senzorii distribuiti recunosc robotul mobil si obiectele in miscare /mersul uman si trimit comenzi robotului..Robotul mobil primeste suportul necesar pentru localizare de la senzorii de mediu.Scopul nostrum este de a localiza robotul mobil fara a aplica nici o povara pentru resursele umane.Noi va propunem un spatiu intelligent ISPACE ca un mediu intelligent cu multi senzori inteligenti , un spatiu in care acum robotii mobile pot coexista cu oamenii.Robotul mobil din aceasta cercetare este unul dintre agentii fizici pentru suportul uman in ISPACE (Lee & Hashimoto, 2001).
Aceasta lucrare este organizata dupa cum urmeaza.La sectiunea 2 sunt explicate conceptual de ISPACE si localizarea robotului intr un spatiu intelligent.Sectiunea 3 descrie modelul de conducere a unui robot mobil si estimarea incertitudinii de pozitie.In sectiunea 4 sunt descrise relatia de transformare a imaginii, proiectia imaginii unei traiectorii realizate de mersul uman, si tehnica de corectare a pozitiei utilizand filtrul Kalman.Sectiunea 5 explica metoda de control propusa aplicata in spatial ISPACE.Simularea si experimental de localizare a robotului sunt effectuate si este verificat efectul metodei propuse.In cele din urma concluziile si indicatiile pentru viitoarele experimente sunt descrise in sectiunea 6.
2.LOCALIZAREA ROBOTULUI INTR-UN SPATIU INTELIGENT
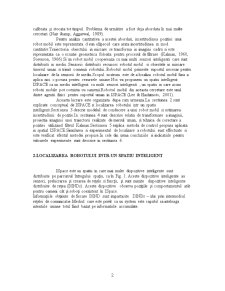
ISpace este un spatiu in care mai multe dispozitive inteligente sunt distribuite pe parcursul întregului spaţiu, ca în Fig. 1. Aceste dispozitive inteligente au senzori, prelucrarea şi crearea de reţele si funcţii, şi sunt numite dispozitive inteligente distribuite de reţea (DINDs). Aceste dispozitive observa poziţiile şi comportamentul atât pentru oameni cât şi roboţi coexistent în ISpace.
Informaţiile obţinute de fiecare DIND sunt impartasite DINDs – ului prin intermediul reţelei de comunicatie.Mediul care este privit ca un system este capabil sa inteleaga intentiile umane totul fiind bazat pe informatiile accumulate.
2.2 SISTEMUL ISPACE CU MULTI –CAMERE
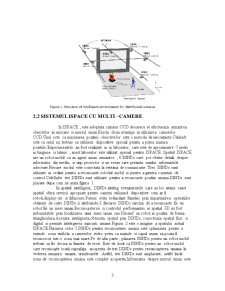
In ISPACE , este adoptata camera CCD deoarece se efectueaza urmarirea obiectelor in miscare si mersul uman.Exista doua avantaje in utilizarea camerelor CCD.Unul este ca masurarea pozitiei obiectivelor este o metoda de necontacte.Celalalt este ca omul nu trebuie sa utilizeze dispositive special pentru a putea masura pozitiile.Experimentele au fost realizate in in laborator, care este de aproximativ 7 metri in lungime si latime ; acest laborator este utilizat special pentru ISPACE. Spatiul ISPACE are un robot mobil ca un agent uman urmaritor , 6 DINDs care pot obtine detalii despre informatia din mediu, si unp proiector si un ecran care prezinta omului informatiile adecvate.Fiecare modul este conectata la reteaua de comunicatie..Trei DINDs sunt utilizate in ordine pentru a recunoaste robotul mobil si pentru a genera comenzi de control.Celellalte trei DINDs sunt utilizate pentru a recunoaste pozitia umana.DINDs sunt plasate dupa cum ne arata figura 1.
Preview document

















Conținut arhivă zip
- Estimarea Traiectoriei unui Obiect.doc
Alții au mai descărcat și

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...


In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...

1. STRUCTURA SI PROPRIETATILE METALELOR. TRATAMENTELE TERMICE ALE METALELOR INTRODUCERE Studiul structurii materialelor metalice este impus de...
Te-ar putea interesa și

INTRODUCERE „Fiecare dintre cele două părţi va căuta să prevadă acţiunea celuilalt, trăgând concluzii din caracterul, instituţiile, situaţia şi...

INTRODUCERE Actualitatea temei de cercetare. În procesul actual de evoluţie a economiei României aspectul gestiunii financiare în administrarea...

Introducere Inca de la descoperirea focului, omul a inteles cat de utila poate fi utilizarea uneia sau mai multor surse de energie in viata de zi...

DATORIA EXTERNA A ROMÂNIEI Prin măsurile adoptate la începutul anului 2017, Guvernul are încredere în capacitatea de mobilizare a mediului de...

Convergenta inseamna evolutie catre atingerea unei anumite tinte, iar drumul parcurs de fiecare tara pentru a ajunge la tinta propusa poate fi...

1. Modelul – instrument de bază al econometriei Modelul reprezintă o formă abstractă de percepere a realităţii, ce are la bază concepte specifice...

În evoluţia sa omenirea a fost preocupată de realizarea unor dispozitive, mijloace tehnice, care să solicite cât mai puţin prezenţa omului pentru o...

CAPITOLUL 1 Continutul aplicativ si metodologic al analizei activitatii economico-financiare 1.1. Necesitatea, tipurile si rolul analizei...