Extras din proiect
- Proiectarea automatelor cu stări finite în logică cablată şi logică programată
Sistemele de conducere cu stari finite pot fi realizate in logica cablata sau in logica programata. Sistemele realizate in logica cablata se caracterizeaza prin:
- functia realizata depinde de conexiuanea dintre module, deci de cablaj;
- orice modificare a functiei realizata de sistemul de conducere necesita modificari hardware.
O abordare fundamentala deosebita de sinteza a sistemelor de
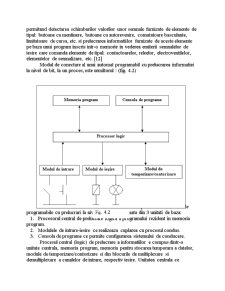
conducere cu stari finite poarta denmirea de logica programata. In aceasta categorie intra toate sistemele ce functioneaza pe baza unui program inscris intr-o memorie. Sistemele care opereaza pe baza de program sunt universale, in sensul ca pot imlementa orice functii fara a necesita modificari hardware. In acest caz pentru fiecare tema de proiectare activitatea consta in programarea memoriei sistemului.[12]
Sistemele care lucreaza pe baza de program contin:
- unitatea centrala care executa instructiile programului;
- memorie in care se pastreaza programul;
- circuite de interfata cu ajutorul carora sistemul de conducere
comunica cu procesul.
Etapele procesului de proiectare a sistemelor de conducere
Desi logica programata se extinde tot mai mult in raport cu logica cablata, fiecare dintre ele prezinta avantaje si dezavantaje ceea ce face ca alegerea intre ele sa nu fie o problema usoara. Sistemele in logica programata por rezolva probleme de mare complexitate pentru care se prelucreaza un volum mare de date cu algoritmi complecsi. Sistemele in logica cablata permit obtinerea vitezei mmaxime de raspuns. Acolo unde apar ambele cerinte se pot realize sisteme mixte care sa contina atat parte de logica cablata, cat şi parte de logica programata.[13]
Etapele proiectarii unui astfel de sistem pot fi reprezetate intr-o diagrama impartita in doua parti: o parte de proiectare a sistemului in logica cablata si o parte de proiectare a sistemului in logica programata. (fig. 4.1)
Fig 4.1 Etapele procesului de proiectare a sistemelor de conducere
În faza de definire a problemei se determina semnalele de intrare si de iesire din sistem, viteza de variatie a acestora, cantitatea si viteza de prelucrare ceruta, tipul de erori si modul lor de tratare. In divizarea sistemelor in logica cablata si logica programata se pot intalni 3 situatii:
1. Exista un numar mic de semnale de intrare si de iesire si logica de prelucrare a acestora e simpla, astfel ca un sistem cu logica cablata special construit este mai economicdecat un sistem cu logica programata in configuratie minima.[12]
2. Cerintele de performanta ale sistemului nu sunt deosebite si pot fi satisfacute de un sistem in logica programata.[12]
3. Logica de programare a semnalelor este complexa si volumul de prelucrat e suficient de mare pentru a impune utilizarea unui sistem in logica programata, dar performantele cerute nu pot fi satisfacute de acesta. Se impune in acest caz ca o prelucrare partiala a semnalelor sa fie realizata cu circuite logice specializate. In acest caz se cauta sa se atribuie sistemului cu logica programata cat mai multe functii de indeplinit, astfel in cat parte de logica cablata sa fie cat mai simpla cu putinta.[12]
Preview document







Conținut arhivă zip
- Implementarea Automatului Programabil Eco Control 667 E in Sistem.doc
Alții au mai descărcat și

ARGUMENT Prin automatizarea unor procese se urmăreşte eliminarea intervenţiei directe a omului în acestea, asigurându-se desfăşurarea lor în...

Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte insemnata din efortul...

In cele ce urmeaza, vom studia modul in care poate fi implementat un compensator fuzzy pe un DSP fabricat de Texas Instruments si anume TMS320C14....

1. Descrierea funcţională a automatului Vom lucra în logică pozitivă şi vom presupune că pe bandă există o singură ţeavă la un moment dat. Se va...

1. Consideratii generale privind contructia si reglarea ventilelor de reglare. Presiunile nominale si domeniile de diametre nominale pentru...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

1. Obiective urmarite : Cunoasterea fizica principala si intelegerea functionarii unui sistem de reglare automata. (SRA) 2. Parte experimentala...
