
Extras din proiect
1. Obiectul lucrării
În industrie există procese lente cu funcţii de transfer care au constante de timp mari care pot să ajungă la zeci de minute sau chiar ore. Industria chimică, metalurgică sau a construcţiilor de maşini sunt un exemplu concludent în acest sens, în unele cazuri nu este neglijabil timpul mort.
Aceste procese au o serie de condiţii dificile in ceea ce priveşte aparatura de reglare
dar in condiţiile actuale exista soluţii de control numeric care pot să controleze temperaturi, presiuni, debite, nivele, concentraţii,PH sau umiditate cu ajutorul unui calculator.
În condiţiile actuale în industrie un calculator de proces este mai mult decât necesar face faţa atât achiziţiei de date cât si reglării efective(calcul comandă sau generare de răspuns proporţional cu comanda).
Proiectarea asistată de calculator a fost un domeniu de mare importanţă în ultimele două decenii şi este de aşteptat ca interesul în acestã activitate să crească continuu în anii care urmează. Mediile de proiectare asistate de calculator au furnizat metodologia eficientă pentru conceperea eficientă şi cu succes a circuitelor numerice de înaltă performanţă şi pe scară largă pentru un domeniu larg de aplicaţii de la prelucrarea informaţiilor (calculatoarele electronice), la telecomunicaţii, controlul producţiei, transport, etc.
Regulatoarele electronice sunt realizate intr-o diversitate largă de tipuri de constructive şi funcţionale, ca regulatoare unificate şi, mai rar, ca regulatoare specializate.
Construcţia regulatoarelor electronice diferă în funcţie de utilizarea lor pentru reglarea proceselor rapide sau lent, unde trebuie să asigure constante de timp compatibile cu dinamica procesului. Dacă pentru reglarea proceselor rapide constantele de timp se obţin relative uşor şi cu precizie corespunzătoare, pentru procesele lente dificultăţile sunt mult mai mari.
Utilizarea circuitelor digitale integrate pe scară medie şi pe scară largă a condus la perfecţionarea regulatoarelor numerice şi la realizarea sistemelor numerice de reglare folosite în cadrul sistemelor ierahizate de automatizare.
În cadrul regulatoarelor electronice realizate cu circuite integrate, care reprezintă concepţia actuala de implementare a legilor de reglare, problemele rezistenţei la intrare , ale valorii constantelor de timp, ale amplificării reprezintă unele probleme principale ale construcţiei acestor regulatoare.
Se urmăreşte realizarea unor sisteme de reglare pe mai multe platforme şi in diferite medii de programare care să să verifice timpii în care se realizează o buclă de reglare.
Tot în cadrul acestui proiect, se are în vedere extinderea studiului privind descompunerea automatelor finite şi la alte metode de descompunere de tip general. După ce pachetul de programe va fi testat pe o mulţime extinsã de circuite test, se va cãuta verificarea acestuia prin utilizarea lui şi pentru realizarea unor proiecte concrete din diverse domenii şi care se bazeazã pe utilizarea circuitele secvenţiale modelate cu ajutorul automatelor finite. Pentru verificarea metodelor de descompunere propuse se va cãuta aplicarea acestora unor circuite care sã fie apoi implementate fizic cu ajutorul unor sisteme de dezvoltare bazate pe circuite logice programabile de tip CPLD utilizând sistemele de dezvoltare ale firmei XILINX disponibile, respectiv XC2C256. Avantajul acestora este că ele permit implementarea unor proiecte de dimensiuni mici până la foarte mari având posibilitatea de a fi reconfigurate foarte uşor de un număr foarte mare de ori. In aceste fel se reduce timpul şi costul implementării unor astfel de circuite secvenţiale.
În aceste proiect se urmareşte in general timpul în care se efectuează o buclă de reglare in mod deodebit cu ajutorul unui CPLD-complex programmable logic device care este o combinaţie de circuite programabile ŞI/SAU şi un grup de macrocelule.
Se doreşte implementarea unui regulator de tip P sau PI care să realizeze reglarea sistemelor cu ajutorul unui CPLD. Aceste tipuri de regulatoare au o relaţie de calcul care depinde de aproximarea cu care se lucrează (metoda dreptunghiului, metoda trapezului) [1] şi, care, deşi devine destul de complicată, este calculată suficient de repede. Acesta merge aproape la toate funcţiile de transfer (excepţie ar fi un proces care are doar timp mort).
Dat fiind faptul că procesele sunt lente şi calculul unei noi valori pentru comandă se realizează suficient de repede, putem spune că un microsistem va putea face faţă reglării unei anumite variabile de proces.
În cadrul acestui proiect se doreşte implementarea unei scheme de reglare în limbajele de programare: LABVIEW şi MATLAB precum şi cu ajutorul CPLD-ului CoolRunner 2, produs al firmei XILINX în limbajul XILINX ISE 5. Regulatorul automat are rolul de a prelua operaţional semnalul de eroare obţinut în urma comparaţiei liniar-aditive a mărimii de
intrare r şi a mărimii de reacţie yr în elementul de comparaţie şi de a elabora la ieşire un semnal de comandă u pentru elementul de execuţie.
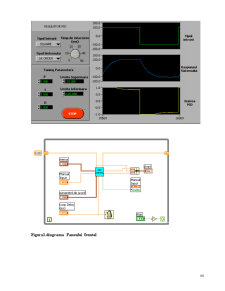
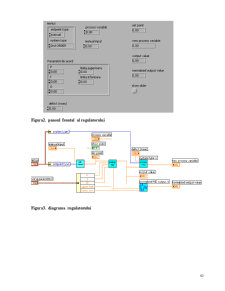
Se realizează un sistem de reglare in limbajul LABVIEW in care sunt introduşi pe rand parametrii de acord ai regulatorului. Se precizeaza ca se implementeaza un regulator PID a caror parametrii pot fi modificaţi de utilizator. De asemenea se pot poate preciza tipul sistemului pe care dorim sa îl reglăm. Astfel se pot utiliza sisteme de ordin întâi precum şi sisteme de ordinul doi. Se pot vizualiza urmatoarele caracteristici: tipul intrării, raspunsul sistemului, precum si o vizualizare a regulatorului PID. Sistemul de reglare se poate structura pe mai multe module prezentate mai detaliat in memoriul justificativ.
De asemenea se prezintă un sistem de reglare realizat în mediul MATLAB în care sunt introduşi de asemenea parametrii de acord ai regulatorului. Se prezinta schemele de reglare in Simulink şi se simulează răspunsul sistemului cu regulatorul PID
În mediul XILINX ISE 5 se modelează un regulator P cu ajutorul CPLD-ului CoolRunnner 2. Se realizează o structură de reglare cu ajutorul circuitelor integrate o implementare care reprezintă o concepţie actuală în ceea ce priveşte reglarea sistemelor.
În fiecare mediu prezentat mai sus se determină timpul în care se execută schema de reglare şi se realizează o comparaţie pentru fiecare implementare realizată.
Se poate evidenţia că, cu ajutorul unui circuit programabil de tipul XC2C256 CoolRunner 2 timpul de execuţie a unei bucle de reglare este mai rapidă decat prin celelalte metode implementare.
Preview document





































































Conținut arhivă zip
- Implementarea si Testarea unor Sisteme de Reglare
- Anexe.doc
- proiect_2.doc
- proiect_3.doc
- proiect_5.doc
Alții au mai descărcat și

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

Capitolul 1 1. Introducere • Importanţa teoriei şi tehnicii reglării automate Reglarea automată ocupă un loc important în ansamblul metodelor...

Capitolul 1 TENDINŢE ŞI DEZVOLTĂRI ÎN CONDUCEREA AUTOMATĂ ŞI ADAPTIVĂ A MAŞINILOR UNELTE În timp s-au conturat mai multe direcţii importante în...

CAPITOLUL 1 Conţinutul politicii de marketing si Locul serviciilor bancare în teoria economică Adoptarea conceptului de marketing de către o...

1. Consideraţii generale 1.1. Conceptul de consultanţă Consultanţa este un serviciu de consiliere profesional prin care se oferă asistenţă de...

Definirea sistemului flexibil de prelucrare Sistemul flexibil de prelucrare SFP poate fi definit ca un ansamblu integrat de maşini-unelte...

1. INTRODUCERE Tema propusa are ca obiectiv principal aplicarea actionarilor electrice cu motoare de inductie fara senzori mecanici la...

Introducere Prin identificarea unui sistem se înţelege un procedeu experimental şi / sau urmat de un algoritm în urma căruia / cărora se obţine o...

Introducere Pe parcursul ultimului deceniu evoluţia calităţii pe arena mondială a cunoscut un salt considerabil. O dovadă elocventă o constituie...