
Cuprins
- I.Tema proiectului 3
- II.Schema de lucru 3
- III.Date initiale. Date calculate 5
- III.1 Date initiale 5
- III.2 Date calculate ,,, 5
- IV.Alegerea si acordarea regulatoarelor 12
- IV.1 Alegerea si acordarea regulatoarelor pentru bucla interioara 12
- IV.2 Alegerea si acordarea regulatoarelor pentru bucla exterioara 13
- V.Scheme.Grafice.Performante 14
- V.1 Schema buclei interioare fara perturbatie 14
- V.2 Schema buclei interioare cu perturbatie 16
- V.3 Schema buclei exterioare fara perturbatie 17
- V.4 Schema buclei exterioare cu perturbatie 18
- V.5 Schema bloc a MCC 19
- V.5.1 Schema bloc fara perturbatie 19
- V.5.2 Schema bloc cu perturbatie 21
- VI. Concluzii 23
- VII. Bibliografie 23
- VIII. Anexa 24
Extras din proiect
Sistem de reglare automat al turatiei unui motor de curent continuu cu excitatie independenta cu regulatoare conventionale PID.
II. Schema de lucru
Servomotoarele electrice sunt masini electrice caracterizate, in principal, prin faptul ca au momentele de inertie ale rotorului de valoare foarte mica, ceea ce implica valori extrem de reduse pentru constanta de timp (electro)mecanica si valori foartemari pentru raportul cuplu/moment de inertie.
Servomotoarele electrice se utilizeaza in sistemele, numite generic, de control al miscarii (de reglare a vitezei si/sau pozitiei). In practica aceste sisteme se regasesc in aplicatii de pozitionare din tehnica de calcul (ex. floppy disk, hard disk, imprimante),la masinile unelte cu comanda numerica, in robotica etc.
La servomotoarele de curent continuu (SMCC sau MCC) campul magnetic este(de obicei) asigurat cu ajutorul magnetilor permanenti (MP), deci fluxul magnetic din masina este constant.
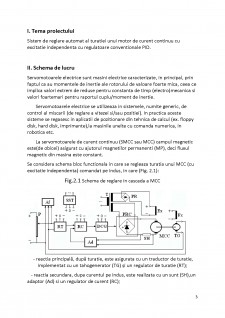
Se considera schema bloc functionala in care se regleaza turatia unui MCC (cu excitatie independenta) comandat pe indus, in care (Fig. 2.1):
Fig.2.1 Schema de reglare in cascada a MCC
- reactia principală, după turatie, este asigurata cu un traductor de turatie, implementat cu un tahogenerator (TG) și un regulator de turatie (RT);
- reactia secundara, dupa curentul pe indus, este realizata cu un sunt (SH),un adaptor (Ad) si un regulator de curent (RC);
- elementul de executie este implementat cu dispozitivul de comanda pe grila (DCG) si puntea redresoare comandata (PRC);
- transformatorul de putere (T) asigura alimentarea pentru PRC si pentru excitatia MCC (printr-o alta punte redresoare, PR), iar sursa stabilizata de tensiune (SST) asigura alimentarea pentru potentiometrul de prescriere a referintei (P), pentru RT, RC, DCG si pentru excitatia TG.
Observatii:
- regulatorul de turatie realizeaza (de regula) o lege de reglare de tip PI sau PID, iar regulatorul de curent realizeaza (in anumite conditii) o lege de reglare P sau PI;
- prin T se asigura si separarea galvanica fata de reteaua electrica, iar prin Ad se asigura separarea galvanica intre circuitului indusului si dispozitivul de automatizare;
- valorile turatiei si/sau a erorii pot fi afisate (Af);
- pentru detalii privind modelarea matematica a MCC si reglarea in
cascada a MCC se recomanda consultarea referintelor [D2, D4, D5, V3].
Schemele de reglare in cascada prezinta, asadar, o serie de avantaje si anume:
- regleaza si limiteaza simultan mai multe marimi;
- micsoreaza influenta perturbatiilor externe asupra marimii de iesire;
- asigura crestea vitezei de raspuns in raport cu modificarea perturbatiilor;
- asigura o buna robustete datorita prezentei mai multor reactii negative,respectiv sensibilitate redusa la variatii ale parametrilor din proces.
Asemenea structuri sunt eficiente daca se aleg corespunzator variabilele intermediare. Dificultatile schemelor in cascada provin din operatiunea de alegere si acordare optima a regulatoarelor, avand in vedere faptul ca referintele interne provin de la regulatoarele externe
III. Date initiale. Date calculate
III.1 Date initiale
Datele initiale sunt dependente de parametrul k, care in acest caz este egal cu 7.
Tensiunea nominala: Un=440Vcc+k => Un=447V
Turatia nominala: nn=3000 rot/min+10∙k => nn=3070 rot/min
Randamentul motorului: η=0.77+0.01∙k => η=0.84
Puterea nominala: Pn=11kW ->(11+0.1∙k)kW => 11700W
Momentul de inertie la ax: Ɉ=0.0015∙k kgm2 => 0.010 kgm2
Bibliografie
1.Ingineria sistemelor automate:Teorie si aplicatii/Mircea Dulau. -Targu Mures, Petru Maior University Press,2016
2.Ingineria sistemelor automate I: Lucrari de laborator/Mircea Dulau,Adrian Gligor,Marius Rusu,2012
Preview document

























Conținut arhivă zip
- Ingineria sistemelor automate II.docx
Alții au mai descărcat și

1Modelarea, simularea si reglarea unghiului de sarcina la valoarea dorita, la un servomotor de curent continuu Fie un motor de curent continuu cu...

CAPITOLUL 1 SISTEME DE REGLARE AUTOMATĂ 1.1. Noțiuni introductive Sistemele de reglare automată (SRA) sau pe scurt, automatizarea, sunt des...

CAPITOLUL I SISTEME, MODELE, SIMULARE În matematică, termenul „simulare” a fost folosit pentru prima dată de către John von Neumann şi S. Ulam...

1.Prezentarea proiectului Tema reprezintă proiectarea unui sistem de reglare automată (SRA) a turației unui motor de curent continuu cu excitație...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

Se considera urmatoarea structura de sistem de reglare automata (SRA) : Elementele componente sunt descrise in ecuatiile : RA – regulator automat...

1. Structura generală a unui sistem de conducere automată. Structura principială a unui sistemul cu conducere automată (SCA) rezulta prin...

Te-ar putea interesa și
CAPITOLUL 1 SISTEME DE REGLARE AUTOMATĂ 1.1. Noțiuni introductive Sistemele de reglare automată (SRA) sau pe scurt, automatizarea, sunt des...

OBIECTIVELE Proiectului Işi propune evidenţierea elementelor de bază ale proiectării subansamblurilor mecanice, utilizate la autovehicule rutiere....
1.Prezentarea proiectului Tema reprezintă proiectarea unui sistem de reglare automată (SRA) a turației unui motor de curent continuu cu excitație...

Reglarea turatiei al motorului de curent continuu cu excitatie independenta 1.Formulare tema: Se proiectează structura de reglare pentru un motor...

1. Formularea temei de proiect PROIECTAREA UNUI SISTEM DE REGLARE AUTOMATĂ A TURAȚIEI UNUI MOTOR DE CURENT CONTINUU (MCC) UTILIZÂND REGULATOARE...

Cap. 1. Introducere Pendulul invers este o problema clasica de control. Procesul este neliniar si instabil, cu un singur semnal de intrare si mai...

1. Formularea temei de proiect PROIECTAREA UNUI SISTEM DE REGLARE AUTOMATĂ A TURAȚIEI UNUI MOTOR DE CURENT CONTINUU (MCC) UTILIZÂND REGULATOARE...

Modelarea hibrida a sistemelor Conceptul de model este un concept de care stiinta s-a folosit si pana acum, dar el a cunoscut o noua evolutie o...