
Cuprins
- I. INTRODUCERE 1
- II. IMPLEMENTARE RELUATOR 3
- III. DESCRIEREA PROIECTULUI 5
- CONCLUZII 14
- Bibliografie 15
Extras din proiect
CAPITOLUL I
INTRODUCERE
Proiectul reprezintă realizarea unui Controller PID cu ajutorul tehnici Fuzzy, cu ajutorul acestui regulator sper sa pot conduce mai multe procese in Matlab Simulink, procese din domeniul transporturilor, astfel incat sa ne putem da seama mai usor evenimentele care s
-ar putea produce si in viata de zi cu zi.Pentru realizarea Controllerului Fuzzy s-a folosit atât varianta Mamdani cât şi varianta Sugeno.
Configurarea acestui regulator este următoarea:
-intrări: eroarea(e) şi derivata erorii(de)
-ieşirea: comanda(c);
Fuzzyficarea va fi realizată dupa următoarea formulă:
_ pentru intrarea e, se vor folosi 7 termeni lingvistici: NG, NM, NS ,Z ,PS ,PM si PG
_ pentru intrarea de, se vor folosi 5 termeni lingvistici: NG,NM NS, Z, PS,PM si PG
_ pentru iesirea c, se vor folosi de asemenea tot 5 termeni lingvistici :NG,NM, NS, Z, PS,PM ,PG
Etichetele lingvistice utilizate au următoarea semnificaţie:
NG – negative great/negativ mare
NM – negative medium/negativ mediu
NS – negative small/negativ mic
Z – zero/zero
PS – positive small/pozitiv mic
PM – positive medium/pozitiv mediu
PG – positive great/pozitiv mare.
Se vor utiliza exclusiv variabile normalizate, adaptarea la procesul condus realizânduse
prin trei factori de scalare: factorul de scalare pentru eroare FSe, factorul de scalare
pentru derivata erorii FSde si factorul de scalare pentru comanda FSc.
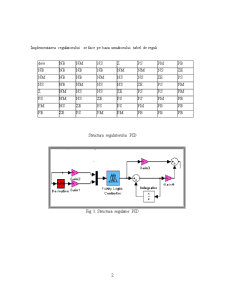
Implementarea regulatorului se face pe baza următorului tabel de reguli:
de/e NB NM NS Z PS PM PB
NB NB NB NB NM NM NS ZE
NM NB NB NM NS NS ZE PS
NS NB NM NS NS ZE PS PM
Z NM NS NS ZE PS PS PM
PS NM NS ZE PS PS PM PB
PM NS ZE PS PS PM PB PB
PB ZE PS PM PM PB PB PB
Structura regulatorului PID
Fig 1. Structura regulator PID
CAPITOLUL II
.IMPLEMENTAREA REGULATORULUI
Fuzzyficarea variabilelor cu care este realizat regulatorul PID este prezentată în figura următoare:
FIG 2. FUZZYFICAREA
Suprafaţa de comandă c este obţinută prin defuzzyficarea MOM şi este prezentată în figura de mai jos:
FIG 3.Suprafaţa de comandă cu defuzzyficare MOM
CAPITOLUL III
DESCRIEREA PROIECTULUI
Pentru proiect mi-am propus sa optimizez problema traficului pe autostrăzi. Primul parametru care poate fi luat în discutie pentru optimizarea traficului este distanta dintre două automobile care circulă în pluton. Să presupunem că automobilul urmărit are viteza v1 iar cel urmăritor viteza v2. În ACC problema distantei impuse di dintre cele două automobile care circulă în pluton este rezolvată prin următorul model polinomial:
di(v2) = z0 + z1 - v2 + z2 - v22 = 3 + z1 - v2 + 0.01 - v22 [m] (1) Se observă caracterul adaptiv al modelului în functie de viteza v2.
Caracterul adaptiv este binevenit iar alegerea mărimii de adaptare este naturală, deoarece v2 este mai uşor de obtinut şi mai sigură, din punctul de vedere al automobilului urmăritor, cel care de fapt este condus prin algoritmul CFA. ACC recomandă valorile de ajustare z1=0.8s sau z1=0.6s.
Problema acestui model este că parametrii z1 şi z2 sunt introduşi artificial, fără a avea vre- un în eles fizic semnificativ pentru oameni. Alegerea lor este euristică, pe baza chestionă- rii unor experti, dar ei nu au nici o legătură cu fenomenul fizic şi nu sunt nici corela i cu parametrii de performan ă ai automobilului pe care se aplică. La elaborarea acestui model a distantei impuse dintre automobile nu s-a aplicat nici un criteriu de optimizare.
În conditiile creşterii continue ale valorilor medii de trafic şi a variatiilor mari ale intensi- tătii sale în functie de ora din zi, de ziua din săptămână sau de perioadele de vârf din an (plecări/sosiri din vacan ă, sărbători, etc.), ne punem problema optimizării distantei impu- se dintre automobilele care circulă în pluton. Doar în acest mod inovativ vom putea creşte capacitatea actualelor autostrăzi, fără investitii semnificative în infrastructură, reechili- brând balan a dintre performan ele sistemului de transport care este autostrada şi costurile sale, pe o pozi ie mai favorabilă.
Pentru a justifica alegerea unui anume criteriu de optimizare a unui sistem atât de com- plex ca şi o autostradă, să trecem în revistă principalii parametri de apreciere a traficului:
- Timpul până la coliziune TTC (Time-to-Collision) este timpul până la care două auto- mobile urmează să se ciocnească, dacă şi-ar păstra constante vitezele momentane:
TTC=d/v2-v1
Valorile negative ale TTC apar când automobilul urmărit Car1 rulează mai repede decât cel urmăritor Car2 şi prin urmare nu există nici un pericol de coliziune. Iminen a unei coliziuni este indicată prin valori pozitive mici ale TTC. Din Fig. 4.12 se observă necesi- tatea limitării TTC, în acest caz la ±40s, deoarece atunci când v2 = v1, TTC tinde la infi- nit! De aceea deseori se apelează la un instrument colateral: traiectoria d(v2 – v1).
- Durata până la accident TTA (Time-to-Accident).
Preview document
















Conținut arhivă zip
- Ingineria Sistemelor cu Aplicatii in Transporturi
- COPERTA ISAT.doc
- pidmamdani.fis
- proiect_isat.doc
- VAR2_CARPIDFUZZY.mdl
- VARI_CAR.mdl
Alții au mai descărcat și

1. Tema proiectului •Se doreste compararea unui regulator clasic PID cu un regulator FUZZY cu ajutorul unei aplicatii in Simulink care sa regleze...

1. INTRODUCERE Sistemul automat pentru localizarea defectelor de izolaţie în reţelele de medie tensiune permite vizualizarea pe monitorul unui...

Conceptele de bază ale logicii fuzzy Logica clasică sau booleană este construită pe două valori de adevăr: “adevărat” sau “fals" (TRUE sau FALSE,...

In cele ce urmeaza, vom studia modul in care poate fi implementat un compensator fuzzy pe un DSP fabricat de Texas Instruments si anume TMS320C14....

1. INTRODUCERE Teoria sistemelor fuzzy introdusa în 1965 de catre Lofti Zadeh la Universitatea Berkeley din California, studiaza sisteme cu mai...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

Noțiuni introductive despre MATLAB și Simulink MATLAB este un limbaj de programare de nivel înalt dezvoltat de către MathWorks care servește la...

Reprezentarea Sistemelor Dinamice Liniare Multivariabile prin Matrice de Transfer 1. Matricea de transfer; legatura cu reprezentarile de tip...
Te-ar putea interesa și

1.1. Aspecte generale privind transporturile Apariţia şi dezvoltarea societăţii omeneşti a impus, fără îndoială, şi nevoia de transport. Omul...

Capitolul I Infrastructura sistemelor de transport Problematica transportului si a traficului rutier se pune in contextul modului in care...

Introducere Odată cu trecerea timpului, companiile se confruntă cu cantităţi tot mai mari de date. De fiecare dată când o persoană extrage numerar...

1. Noţiuni generale • Ce sunt fondurile europene ? Fondurile europene sunt acele instrumente financiare elaborate de Uniunea Europeana pentru...

1. Rezumat Mediul de afacere românesc în urma procesului de aderare la U.E. se confruntă cu o serie de dificultăti dar beneficiază si de multe...

Cap. 1 Introducere Procesorul ARM® Cortex™-R4 deschide o arie largă de produse deeply-embedded de înaltă performanţă ce au costuri de sistem şi...

Cp1:I.Rolul Fct esentiala a transp consta in a permite oamenilor in activitatile lor sa nu considere spatiul o restrictive.transp=ramura...

1. Subiectul 1. Sistem. Definiție. Un sistem este un ansamblu de elemente dependente între ele și formând un întreg organizat, cu o structură...