Extras din proiect
Menţinerea automată a distanţei optimale între automobile este una dintre apli¬caţiile care va avea cu siguranţă o largă aplicabilitate pe autostrăziile viitorului. Astăzi există doar puţine automobile dotate cu o astfel de facilitate, dar necesitatea ei este evi¬dentă în condiţiile creşterii necontenite a traficului. Tehnologia aferentă este în cea mai mare parte accesibilă la preţuri rezonabile. Principalele dispozitive necesare, res¬pectiv senzorii de tip radar sunt deja utilizaţi frecvent la asistarea parcării, pentru măsu¬rarea distanţei faţă de obiectele fixe din imediata apropiere a automobilului.
Recunoaşterea mediului înconjurător în timpul rulării este de asemenea realizată principial (Wolkswagen şi alţii). Obstacolele fixe precum şi celelalte automobile de pe autostradă sunt recunoscute prin senzori inteligenţi obţinuţi din fuziunea informaţiilor obţinute de la senzorii radar cu cele oferite de imagini obţinute prin camere video.
În cele ce urmează se va trata problema utilizării informaţiilor oferite de senzorii de distanţă în sensul identificării unei metode automate de menţinere a distanţei opti¬male dintre un automobil şi automobilul precedent. Simpla reglare a cestei distanţe la valori prestabilite în mod empiric este doar o primă abordare, ineficientă în explatare din cauza complexităţii problemei. Optimizarea distanţei dintre automobile este nece¬sară din cauza că viteza unui automobil în trafic, precum şi derivata ei acceleraţia sunt în principiu aleatorii.
Vom defini distanţa optimă dintre automobile ca fiind distanţa minimă la care, în condiţii tehnice date, se poate evita coliziunea dintre ele prin frânarea automobilului urmăritor, fără schimbarea traiectoriei. Precizarea condiţiilor tehnice este necesară deoa¬rece distanţa optimă este dependentă de calitatea aparatelor de rulare şi a instalaţi¬ilor de frânare ale celor două automobile.
Problema principală în definirea unui algoritm adecvat este aceea că distanţa optimă nu depinde numai de vitezele de rulare în sine ci şi de tendinţele lor. Analizând modul de acţiune al unui şofer ajungem la concluzia că el este neliniar, adaptat la tend¬inţele celor două automobile. Dacă de exemplu, dacă distanţa iniţială dintre automobile este prea mică, chiar dacă automobilul anterior nu frânează, automobilul urmăritor frâ¬nează uşor, pentru a readuce distanţa într-o zonă sigură. Dacă distanţa iniţială dintre automobile este mare dar primul automobil frânează puternic, nu are nici un rost să se aştepte fără reacţie scăderea distanţei, fiind mult mai indicată iniţierea unei frânări puternice şi de către automobilul urmăritor.
În esenţă şofe¬rul caută să adopte o conduită anticipativă, bazată pe estimarea poziţiilor viitoare ale celor două automobile. Definirea unui algoritm de menţinere a unei distanţe optime este în aceste condiţii extrem de complicată. Pe de altă parte modul de acţiune al şoferului poate fi reprodus, cu mai mică sau mai mare precizie, cu ajutorul sistemelor expert. Dat fiind caracterul preponderent lingvistic al regulilor se impune de la început o abordare de tip fuzzy-expert. Este totodată posibil ca după acumularea unei experienţe relevante să se poată identifica ulterior şi alţi algoritmi.
2. Prezentarea metodologiei. Metoda de simulare
Având în vedere caracterul teoretic al acestei abordări, principala metodă de lucru este simularea pe calculator. Pentru simularea cinematicii automobilelor se utili¬zează un model de bază în timp continuu, implementat în Simulink (Matlab) şi prezentat în fig. 1.
Fig. 1. Modelarea Simulink a ecuatiei de miscare a unui automobil
Ecuaţia utilizată, cu notaţiile din figură, este cea mai simplă posibilă:
(1)
unde parametrii automobilului sunt M [kg] masa, x[m] poziţia, Ftr [kN] forţa de tracţi¬une şi Ffr [kN] forţa de frânare. Alţi parametri sunt poziţia iniţială x0 [m], viteza ini¬ţială v0 [km/h], viteza instantanee v [km/h] şi accelera¬ţia instantanee [m/s2]. S-a renunţat la modelarea detaliată a frecărilor (cu aerul, cu drumul) şi a altor fenomene (înclinarea traseului, curbe, etc.), care sunt nerelevante în acest context şi pot fi considerate incluse fie în Ftr fie în Ffr.
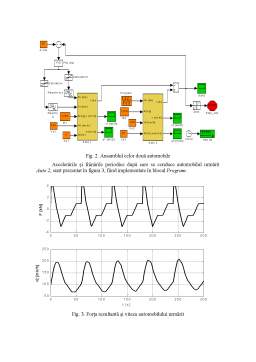
În continuare două astfel de modele (Auto 1 şi Auto 2) sunt conectate, ca în fig.2.
Distanţa dintre ele d [m] este utilizată ca intrare în regulatorul distanţei PID dist, care în exemplul din figură este de tip PID. Căile de comandă pentru accelerări şi frânări sunt separate prin semn, în cazul frânării semnul fiind negativ. Cele două canale prezintă întârzieri, modelate prin timpii morti Reactie acc şi Reactie fr. Simularea se întrerupe în momentul tamponării automobilelor. Cele două automobile se consideră ca fiind foarte asemănă¬toare (au aceeaşi forţă de tracţiune maximă şi aceeaşi forţă de frânare maximă, egale cu 4 kN respectiv –4 kN şi ca având aceeaşi masă, de 1200kg.
Pentru majoritatea simulărilor care urmează viteza iniţială a ambelor automobile este de 100km/h iar distanţa iniţială este 25m.
Preview document











Conținut arhivă zip
- 3Trans.doc
- cars1.mdl
Alții au mai descărcat și

Capitol 1 Introducere 1.1Motivaţie La nivel mondial există tendinţa de creştere a numărului de autovehicule aflate în exploatare cu implicaţie...

1. Tema proiectului •Se doreste compararea unui regulator clasic PID cu un regulator FUZZY cu ajutorul unei aplicatii in Simulink care sa regleze...

1.INTRODUCERE Proiectul reprezintă realizarea unui Controller PD cu ajutorul tehnici Fuzzy.Pentru realizarea Controllerului Fuzzy s-a folosit atât...

Proiectul prezintă simularea temperaturii într-o cameră si menţinerea ei la o valoare impusă. Simularea se bazează pe modelul matematic atât al...

Schema de principiu Introducere • Modelul sistemului de reglare automată a vitezei unui automobil este relativ simplu. • Dacă inerţia roţilor...

Argument Tema proiectului meu „Utilizarea senzorilor de proximitate” face parte integrantă din domeniul pregătirii mele profesionale pentru...

Modelarea suspensiei active a unui automobile este o problema de reglare interesanta.Cand sistemul de supensie este realizat ,modelul ¼ (o roata...

1. Introducere 1.1 Enuntul problemei Se da un automobil care are functia de cruise control inplementata, si se doreste studierea problemei si a...
Te-ar putea interesa și

Menţinerea automată a distanţei optime între automobile Acest proiect tratează problema menţinerii distanţei optime între două autovehicule pe...

Lucrarea de fata prezinta modelarea si simularea unui automat de mentinere a distantei optime intre doua masini In simulare vor exista doua...