Cuprins
- 1. Microcontrolerul PIC
- 2. Caracteristici ale microcontrolerului PIC18F452
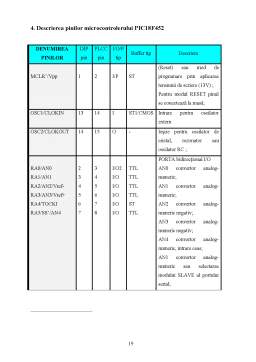
- 3. Configuraţia pinilor microcontrolerului PIC18F452
- 4. Descrierea pinilor microcontrolerului PIC18F452
Extras din proiect
MICROCONTROLERUL PIC18F452
1. Generalităţi
La modul general un controler (“controller” termen de origine anglo-saxonă, cu un domeniu de cuprindere foarte larg) este o structură electronică destinată controlului unui proces sau unei caracteristici a mediului exterior, fără să fie necesară intervenţia operatorului uman.
Un microcontroler este un "calculator pe un chip". Cuvântul "micro" sugerează mărimea redusă a dispozitivului iar "controler" ne spune că dispozitivul poate fi folosit pentru a controla obicte, procese sau evenimente.
Există la ora actuală un număr foarte mare de tipuri constructive de microcontrolere.
Un criteriu de clasificare care se poate aplica întotdeauna este lungimea (dimensiunea) cuvântului de date. Funcţie de puterea de calcul dorită şi de alte caracteristici se pot alege variante având dimensiunea cuvântului de date de 4, 8, 16, sau 32 de biţi.
Nu este obligatoriu ca dimensiunea cuvântului de date să fi egală cu dimensiunea unui cuvânt maşină. Există şi multe variante zise dedicate (specializate prin intermediul codului preprogramat şi al resurselor hard) pentru comunicaţie, controlul tastaturilor, controlul aparaturii audio–video, prelucrarea numerică a semnalului, etc
Practic cea mai mare parte a microcontrolerelor se realizează la ora actuală în tehnologie CMOS (tehnologii similare seriilor standard CMOS de circuite numerice HC, AC, ALV). Se pot realiza astfel structuri cu un consum redus (care depinde de frecvenţa de lucru) permiţând eventual alimentarea de la baterie.
Logica internă este statică (total, sau în cea mai mare parte) permiţând astfel, în anumite condiţii, micşorarea frecvenţei de ceas sau chiar oprirea ceasului în ideea optimizării consumului.
Tehnologia este caracterizată şi de o imunitate mai mare la perturbaţii, esenţială într-un mare număr de aplicaţii specifice.
Se realizează şi variante pentru domeniu extins al temperaturii de funcţionare (de exemplu –40 +85 °C)
Există diverse variante de încapsulare (plastic şi mai rar ceramică), multe destinate montării pe suprafaţă (SMT) : DIP (de la 8 la 68 pini), SOIC, PLCC, PQFP, TQFP (> 100 pini), etc
PIC18F452 aparţine unei clase de microcontrolere de 32 biţi cu arhitectură RISC. Structura lui generală este arătată în schiţa următoare reprezentând blocurile de bază.
Fig. 1-Structura unui microcontroler
Memoria program (FLASH)-pentru memorarea unui program scris.
Pentru că memoria ce este făcută în tehnologia FLASH poate fi programată şi ştearsă mai mult decât odată, aceasta face microcontrolerul potrivit pentru dezvoltarea de componentă.
EPROM-memorie de date ce trebuie să fie salvate când nu mai este alimentare.
Este în mod uzual folosită pentru memorarea de date importante ce nu trebuie pierdute dacă sursa de alimentare se întrerupe dintr-o dată. De exemplu, o astfel de dată este o temperatură prestabilită în regulatoarele de temperatură. Dacă în timpul întreruperii alimentării această dată se pierde, va trebui să facem ajustarea încă o dată la revenirea alimentării. Astfel componenta noastră pierde în privinţa auto-menţinerii.
RAM-memorie de date folosită de un program în timpul executării sale. În RAM sunt memorate toate rezultatele intermediare sau datele temporare ce nu sunt cruciale la întreruperea sursei de alimentare.
PORTUL A şi PORTUL B sunt conexiuni fizice între microcontroler şi lumea de afară. Portul A are 5 pini, iar portul B are 8 pini.
TIMER-UL LIBER (FREE-RUN) este un registru de 8 biţi în interiorul microcontrolerului ce lucrează independent de program. La fiecare al patrulea impuls de ceas al oscilatorului îşi încrementează valoarea lui până ce atinge maximul (255), şi apoi începe să numere tot din nou de la zero. După cum ştim timpul exact dintre fiecare două incrementări ale
conţinutului timer-ului, poate fi folosit pentru măsurarea timpului ce este foarte util la unele componente.
Preview document












Conținut arhivă zip
- Microcontrolerul PIC18F452.doc
Alții au mai descărcat și

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...