
Cuprins
- 1. Introducere. Motoare pas cu pas – caracteristici generale
- 2. Determinarea momentului de inertie redus la arborele motorului. Determinarea momentului rezistent redus la arborele motorului
- 3. Modelarea matematica a functionarii sistemului in regim dinamic
- 4. Simularea functionarii sistemului de actionare pentru comanda in tensiune: treapta, rampa, sinusoidala
- 5. Studiul stabilitatii sistemului de actionare
- 6. Comanda motorului electric pas cu p 22422p1524w as utilizand placa de achizitie de date
Extras din proiect
Tema proiectului
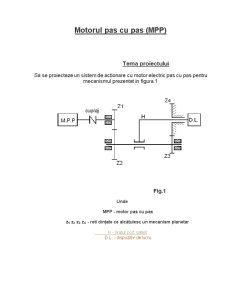
Sa se proiecteze un sistem de actionare cu motor electric pas cu pas pentru mecanismul prezentat in figura 1
Fig.1
Unde
MPP - motor pas cu pas
z1 z2 z3 z4 - roti dinţate ce alcătuiesc un mecanism planetar
H - braţul port satelit
D.L. - dispozitiv de lucru
1. Caracteristicile motorului pas cu pas (MPP) HY200-3424 0130BX08 sunt :
• Unghi de pas : 1.8°
• Precizia unghiulara de pas[%] : 5
• Curent nominal pe faza[A] : 1.3
• Rezistenta pe faza[V] : 4.6
• Inductanţa pe faza[mH] : 16
• Cuplu de regim [N*cm] : 120
• Cuplu de pornire[N*cm] : 10
• Inerenta rotorului[gr*cm2] : 640
• masa [Kg] : 1.35
• clasa de izolare : B
2. Caracteristicile motorului pas cu pas (MPP) HY200-3424 0170BX08 sunt :
• Unghi de pas : 1.8°
• Precizia unghiulara de pas[%] : 5
• Curent nominal pe faza[A] : 1.7
• Rezistenta pe faza[V] : 1.8
• Inductanţa pe faza[mH] : 5
• Cuplu de regim [N*cm] : 120
• Cuplu de pornire[N*cm] : 10
• Inertia rotorului[gr*cm2] : 640
• masa [Kg] : 1.35
• clasa de izolare : B
3. Caracteristicile motorului pas cu pas (MPP) HY200-3424 0310AX08 sunt :
• Unghi de pas : 1.8°
• Precizia unghiulara de pas[%] : 5
• Curent nominal pe faza[A] : 3.10
• Rezistenta pe faza[V] : 0.95
• Inductanţa pe faza[mH] : 3.2
• Cuplu de regim [N*cm] : 120
• Cuplu de pornire[N*cm] : 10
• Inertia rotorului[gr*cm2] : 640
• masa [Kg] : 1.35
• clasa de izolare : B
4. Caracteristicile motorului pas cu pas (MPP) HY200-3424 0470AX08 sunt :
• Unghi de pas : 1.8°
• Precizia unghiulara de pas[%] : 5
• Curent nominal pe faza[A] : 4.7
• Rezistenta pe faza[V] : 0.39
• Inductanţa pe faza[mH] : 1.5
• Cuplu de regim [N*cm] : 120
• Cuplu de pornire[N*cm] : 10
• Inertia rotorului[gr*cm2] : 640
• masa [Kg] : 1.35
• clasa de izolare : B
Mecanismul actionat este caracterizat de urmatoarele marimi :
Nr.crt z g[mm] m[mm] Mrez[N*m] JDL[Kg*m2] f[pas/s] Model t[s]
1 52 3 4 0.25 6.5*10-7 100 3424 0.5
2 94 3
3 35 3 4.5
4 86 3
Proiectarea se va face tinand seama de posibilitatea de a utiliza 4 motoare produse de firma MDP (Franta)
1. Introducere.
Motoare pas cu pas – caracteristici generale
In multe dintre aplicatiile tehnice se astazi se prefera utilizarea unor sisteme de actionare electrice care utilizeaza motoare pas cu pas.
Motorul pas cu pas (denumit uneori si motor sincron cu impulsuri), transforma impulsurile electrice de tensiune in deplasari unghiulare discrete. La primirea unui impuls rotorul motorului isi schimba pozitia cu unghi bine precizat, functie de impuls. Unghiul minim de deplasare al rotorului este denumit pas. Motoarele pas cu pas permit realizarea unor sisteme auotmate de tip discret care nu au nevoie de legaturi inverse, deoarece stabilesc o corespondenta directa riguros univoca intre informatia primita si deplesarea unghiulara realizata.
ACŢIONAREA CU MOTOARE PAS CU PAS
Generalităţi (construcţie şi funcţionare, clasificare, definiţii)
Motorul electric pas cu pas (MPP) este un convertor electromecanic care realizează conversia impulsurilor de comandă aplicate fazelor motorului într-o mişcare de rotaţie ce constă din deplasări unghiulare discrete, de mărime egală care reprezintă paşii motorului. Numărul paşilor efectuaţi trebuie să corespundă, în cazul unei funcţionări corecte, cu numărul impulsurilor de co¬mandă aplicate fazelor motorului.
Majoritatea MPP sunt bidirecţionale şi permit o accelerare, oprire şi inver¬sare rapidă fără pierderi de paşi, dacă sunt comandate cu o frecvenţă inferi¬oară frecvenţei limită corespunzătoare regimului respectiv de funcţionare. Pentru extinderea funcţionării motoarelor pas cu pas la viteze mai mari decât viteza corespunzătoare frecvenţei limită, este necesară o accelerare prin creşterea treptată a frecvenţei impulsurilor de comandă.
MPP sunt utilizate in special în aplicaţiile unde se doreşte realizarea unei mişcări incrementale, folosind sisteme de comandă numerică.
Avantajele utilizării MPP sunt următoarele.
- asigură univocitatea conversiei impuls-deplasare şi pot fi utilizate în circuit deschis;
- gamă largă de frecvenţe de comandă;
- precizie si rezoluţie (număr de paşi pe rotaţie) mari, ceea ce simplifică lanţul cinematic motor-sarcină;
- permit porniri, opriri, inversări, fără pierderi de paşi;
- memorează poziţia;
- sunt compatibile cu tehnica numerică.
Preview document



























































Conținut arhivă zip
- Motorul Pas cu Pas.doc
Alții au mai descărcat și

CAPITOLUL I NOTIUNI GENERALE ALE MOTORULUI PAS CU PAS 1.1. Principiul constructiv si de functionare Motorul pas cu pas are o utilizare larga,...

Argument Ştiinţa este un ansamblu de cunoştinţe abstracte şi generale, fixate într-un sistem coerent obţinut cu ajutorul unor metode adecvate şi...

4.1Introducere ELEMENTE CONSTRUCTIVE SI DE CALCUL ALE ROBOŢILOR INDUSTRIALI Construcţia RI trebuie sa răspundă cerinţelor funcţionale de...

Introducere Dispozitivele de apucare (DA) reprezintă veriga finală din alcătuirea unui robot industrial, a manipulatoarelor şi a altor...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

Elementele de executie sunt componente ale sistemelor automate care primesc la intrare semnale de mica putere de la blocul de conducere si...

1. CONVERTOARE NUMERIC-ANALOGICE Convertoarele de tip numeric-analogic sunt dispozitive care au rolul de a transforma informaţiile date sub formă...

Capitolul 1 INTRODUCERE ÎN STUDIUL SISTEMELOR AUTOMATE 1.1. Concepte, metode şi principii Ramura ştiinţei care se ocupă cu studiul metodelor şi...
Te-ar putea interesa și
CAPITOLUL I NOTIUNI GENERALE ALE MOTORULUI PAS CU PAS 1.1. Principiul constructiv si de functionare Motorul pas cu pas are o utilizare larga,...

Introducere Circumstanţele în care ne găsim astăzi în domeniul microcontrolerelor şi-au avut începuturile în dezvoltarea tehnologiei circuitelor...

Introducere Motorul Pas Cu Pas Are O Utilizare Largă, Datorită Tendinței De Funcționare Numerică A Elementelor Din Structura Sistemelor De Comandă...

1.Scopul si utilitatea sistemului Motoarele pas cu pas se folosesc acolo unde este necesară precizie ridicată (hard disc, copiatoare ,imprimante)....

CAPITOLUL 1 PROBLEMATICA SISTEMELOR DINAMICE 1.1. Aspecte generale privind noţiunea de sistem În general noţiunea de sistem este utilizată în...

I. GENERALITĂŢI I.1. Sistemele de acţionare Prin element de acţionare electrică se înţelege un motor electric ce urmăreşte un semnal de comandă...

I. DATE INIŢIALE Tipul motorului pas cu pas: cu reluctanţă variabilă Curentul nominal: I = 3A Tensiunea de alimentare: U = 50V Secvenţa de...

I. INTRODUCERE Punctul de pornire al acestui proiect este cerinta de proiectare a unui sistem de comanda pentru motorul pas cu pas folosind un...