Extras din proiect
NOŢIUNI DE AUTOMATIZAREA,
CIBERNETIZAREA ŞI ROBOTIZAREA
PROCESELOR TEHNOLOGICE
CUPRINS
1. Automatizarea proceselor tehnologice
2. Cibernetizarea proceselor tehnologice
3. Robotizarea proceselor industriale
1. Automatizarea proceselor tehnologice
Realizarea unor produse de calitate presupune controlarea riguroasă a procesului de producţie din punct de vedere al variabilelor de proces. Abaterea de la acest regim se datorează unor perturbaţii. Sesizarea acestor perturbaţii şi anularea efectelor induse se poate realiza prin conducerea automată a proceselor tehnologice.
Prin automatizare se înţelege echiparea unor instalaţii cu dispozitive tehnice care să asigure desfăşurarea operaţiilor în condiţii optime, fără intervenţia nemijlocită a operatorului uman.
Ansamblul format din procesul supus automatizării şi dispozitive tehnice ce
asigură automatizarea acestuia constituie un sistem automat. Dispozitivele tehnice
reprezintă elemente de automatizare care îndeplinesc funcţii specializate de comparaţie, semnalizare, comandă, reglare, blocare, dispecerizare etc.
Sistemele automate (SA) se clasifică după mai multe criterii astfel:
a) după felul acţiunii:
- cu comandă continuă;
- cu comandă discontinuă;
b) după scopul urmărit:
cu comandă program automată pentru operaţii sau cicluri de fabricaţie,
funcţionând pe baza unor informaţii programate;
cu reglarea automată a variabilelor comandabile (timp, temperatură, presiune,
debit etc);
cu semnalizarea automată ce funcţionează pe baza unui cod convenţional;
cu avertizare automată la depăşirea unor limite ale valorilor de siguranţă;
de blocare automată ;
de protecţie automată pentru prevenirea depăşirii limitelor admise.
c) după structura sistemului automat:
convenţionale, cu regulatoare automate pentru menţinerea constantă a unor
parametri care pot fi: cu referinţă fixă sau mobilă;
cu structură evoluată ce realizează funcţii de conducere în concordanţă cu
anumiţi indicatori de performanţă, cu ajutorul calculatoarelor.
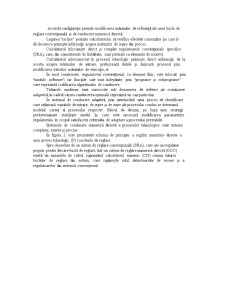
Sistemul de reglare automată, SRA (fig.1), cuprinde schema bloc a sistemului
cu elementele componente, legăturile dintre aceste componente, mărimile ce se transmit
prin aceste legături şi sensul de transmitere a acestor mărimi.
În principiu, în sistemele de reglare automată se pleacă de la un semnal de intrare,
i , care este o mărime comandată prestabilită de operatorul uman. Această mărime este
comparată prin diferenţă cu valoarea r a factorului reglat, rezultată prin convertirea
mărimii reale e p în semnal de aceeaşi natură cu i. Rezultă abaterea a = i-r , cu valori pozitive, negetive sau 0. Semnalul corespunzător abaterii a are o energie cu mult mai mică decât cea necesară acţionării elementului de execuţie, prin urmare semnalul este
amplificat prin intermediul unui dispozitiv de amplificare, intră în elementul de execuţie şi de aici este trimisă procesului de reglat sub formă de mărime efectivă de execuţie, m.
Din proces rezultă mărimea de ieşire e p, ce reprezintă parametru reglat.
Prin intermediul blocului fictiv de introducere a perturbaţiei N acţionează
componenta mărimii perturbatorii ( ze ) asupra componentei mărimii de ieşire din proces
( pe ). Prin aplicarea legii suprapunerii cauzelor şi efectelor, mărimea efectivă de ieşire din circuit devine e= e p + e z.
Mărimea de ieşire din proces este preluată de traductorul M, situat pe calea de
reacţie a circuitului de reglare prelucrată de acesta şi transmisă ca mărime de reacţie r.
În elementul de comparaţie C din regulatorul automat situat pe calea directă a
circuitului intră mărimea i şi mărimea de reacţie r, ambele de aceeaşi natură fizică.
Diferenţa dintre ele reprezintă mărimea abaterii, a.
z
N
ez
Regulator automat
a
C
R
calea
directă
i
c
Element de execuţie
c'
A1 E
m
ep
e
P
Traductor T
r'
A M
calea
de reacţie
r
e
Fig.1. Sistem de reglare automată
C - element de comparaţie; R - regulator automat; A 1 - amplificator de execuţie;
E - elementul de execuţie; P - obiectivul condus (utilaj/instalaţie); N - bloc fictiv
de introducere a perturbaţiei; M - traductor; A 2 - amplificator de reacţie;
i - mărimea de intrare ; a - abaterea; c - mărimea de comandă ; c' - mărimea de
comandă amplificată; m - mărimea de execuţie; e z - componenta mărimii de ieşire
datorată perturbaţiei; e p - componenta mărimii de ieşire din proces; e - mărimea
de ieşire e = e z + e p; r' - mărimea de reacţie a traductorului.
Preview document









Conținut arhivă zip
- Notiuni de Automatizare, Cibernetizare si Robotizare a Proceselor Tehnologice.doc
Alții au mai descărcat și

CAPITOLUL 1. GENERALITĂŢI PRIVIND AUTOMATELE PROGRAMABILE 1.1.Definiţii şi caracteristici. Automatele programabile sau PLC-urile sunt...

Modulul SISTEME DE AUTOMATIZARE este destinat pregătirii elevilor din domeniul TEHNIC, nivel 3, (clasa a XI-a- liceu tehnologic şi clasa a XII-a...

Introducere Simularea evenimentelor discrete este o abordare foarte bună în ceea ce privește modelarea unui sistem real și pentru a-i reproduce...

Definirea sistemului flexibil de prelucrare Sistemul flexibil de prelucrare SFP poate fi definit ca un ansamblu integrat de maşini-unelte...

4.1Introducere ELEMENTE CONSTRUCTIVE SI DE CALCUL ALE ROBOŢILOR INDUSTRIALI Construcţia RI trebuie sa răspundă cerinţelor funcţionale de...

Argument Proiectul cu tema “Concepţie de automatizare industrială modernă” este structurat în 5 capitole, fiecare capitol având subcapitolele...

Principalele principii care stau la baza unui system flexibil de productie sunt: principiul flexibilitatii, principiul integrarii, principiul...

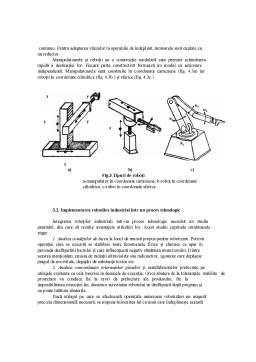
Manipulatorul este sistemul mecanic automat a carui comanda se bazeaza pe sisteme rigide care presupun o interventie in structura fizica a...
Te-ar putea interesa și

O intreprindere inovanta este acea intreprindere care in ultimii trei ani a introdus un produs/serviciu semnificativ diferit de ceea ce producea...
