Cuprins
- PROIECTAREA UNUI SISTEM DE ACȚIONARE CU MOTOR DE CURENT CONTINUU 2
- INTRODUCERE 2
- SISTEME DE ACȚIONARE ELECTRICĂ. GENERALITĂȚI 2
- LANȚURI CINEMATICE 2
- Caracteristicile lanțurilor cinematice 3
- Asocierea lanțurilor cinematice 5
- MAȘINI ELECTRICE 7
- ACȚIONĂRI CU MAȘINI SINCRONE. 8
- Generalități 8
- MOTORUL SINCRON 9
- Pornirea motorului sincron 9
- Frânarea motorului sincron 10
- Motoare sincrone speciale 10
- Motoare sincrone reactive (MSR) 10
- Motoarele pas cu pas (MPP) 11
- ACȚIONĂRI CU MAȘINI ASINCRONE 12
- Generalități 12
- MOTORUL ASINCRON 12
- Pornirea motorului asincron trifazat 12
- Pornirea motorului asincron monofazat 13
- ACȚIONĂRI CU MOTOARE DE CURENT CONTINUU 13
- DESCRIEREA ȘI FUNCȚIUONAREA MOTORULUI DE CC 14
- Ecuațiile de funcționare 14
- Caracteristicile de funcționare ale motorului de curent continuu 15
- A. Motorul cu excitație în derivație 15
- Motorul cu excitație serie 18
- La acest motor înfășurarea rotorică este în serie cu înfășurarea de excitație, (fig. 1.5). 18
- Motorul cu excitație mixtă 18
- Pornirea motoarelor de curent continuu 19
- Regimul de frânare la motorul de curent continuu 21
- Regimul de frânare la motorul de curent continuu cu excitație în derivație 21
- Frânarea cu recuperare 22
- Frânarea în contracurent 22
- Frânarea dinamică 23
- Regimul de frânare la motorul de curent continuu cu excitație serie 23
- Frânarea cu recuperare de energie 23
- Frânarea dinamică 23
- Frânarea în contracurent 24
- REGLARE A TURAȚIEI MOTORULUI DE CURENT CONTINUU 25
- Reglajul turației mcc cu excitație derivație 25
- Reglajul turației motorului de curent continuu cu excitație serie 27
- Sisteme de reglare a vitezei m.c.c. alimentate prin impulsuri 29
- PROIECTUL TEHNIC 32
- Generalități 32
- Părțile componente ale schemei 33
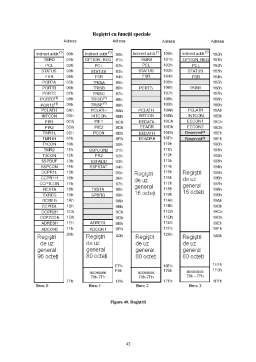
- Microcontroller PIC16F874 35
- ALGORITMUL DE PROGRAMARE 59
- Schema algoritmului 59
Extras din proiect
INTRODUCERE
SISTEME DE ACȚIONARE ELECTRICĂ. GENERALITĂȚI
Un sistem de acționare electrică reprezintă o mulțime de obiecte interconectate și interdependente în scopul realizării conversiei electromagnetice a energiei pentru un anumit proces tehnologic.
Componentele principale ale unui sistem de acționare electrică sunt : motorul electric, mașina de lucru, transmisia si elementul de execuție (fig.1).
Figura 1. Componentele unui sistem de acționare
Motorul electric realizează transformarea puterii electrice în putere mecanică.
Mașina de lucru ML este antrenată de motorul electric M și realizează anumite operații dintr-un proces tehnologic.
Transmisia T reprezintă legătura mecanică dintre motor și mașina de lucru, cu rolul de a realiza transferul de putere mecanică, și eventual, de a schimba parametrii acestei puteri (viteza unghiulară, cuplu).
Elementul de execuție EE are drept scop alimentarea cu energie electrică a motorului si comanda funcționarii motorului în conformitate cu anumite cerințe.
Realizarea si funcționarea optimă a unui sistem de acționare electrică presupune, în primul rând, cunoașterea foarte exactă a procesului tehnologic și a mașinii de lucru folosite, funcție de care se vor alege sau calcula si construi motorul electric, elementul de execuție și elementul de transmisie, avându-se în vedere asigurarea unui cost cât mai redus și a unei mari fiabilități în funcționare.
LANȚURI CINEMATICE
În lanțului cinematic. schemele cinematice structurale mecanismele care realizează funcții identice, dar sunt de naturi diferite se reprezintă prin același simbol convențional.
Schema fluxului cinematic este o reprezentare intuitivă a modului de transmitere a mișcării prin mecanismele
Caracteristicile lanțurilor cinematice
Ecuația de transfer:
Figura 2. Schema bloc-Funcția de transfer
unde:
i - raport de transfer
xi - mărime de intrare
xe - mărime de ieșire
Figura 3. Mecanismul șurub-piuliță
xe = vav =ns psc
unde:
vav - viteza de avans
ns - turația șurubului
psc - pasul șurubului conducător
;
Figura 4. Cinematica mișcării
-
Figura 5. Raportul de transfer
;
Notăm: ; ;
Rezultă:
unde:
iT - raport total de transfer
iC - raport constant
iR - raport reglabil
iD - raport dimensional
Ecuația de transfer a lanțului cinematic:
Ecuația de reglare a lanțului cinematic:
Mărimile de ieșire a lanțurilor cinematice pot să aibă la o anumită mașină-unealtă valori diferite:
ye1
Raportul de reglare a mărimii de ieșire:
Preview document
































































Conținut arhivă zip
- Proiectarea unui sistem de actionare cu motor de curent continuu.doc
Alții au mai descărcat și

Am ales ca temă a lucrării de licenţă „Regulator de turaţie” deoarece această temă este de strictă actualitate, fiind cea mai modernă variantă de...

1. Tema proiectului Se va proiecta sistemul de automatizare pentru o locuinta individuala structurata pe doua niveluri: parter si etaj. In...

Se doreşte realizarea modelului matematic al unui motor de curent continuu cu ax lung Fie un motor de curent continuu cu excitaţie constantă,...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...

Capitolul 1. ELECTRONICA DE PUTERE ÎN SISTEMELE DE REGLARE AUTOMATA 1.1. Circuite electronice de putere folosite în sisteme de reglare automata;...
Te-ar putea interesa și

Introducere Maşina de curent continuu este maşina electrică la care schimbul principal de energie cu o reţea se face în curent continuu. Se...

Capitolu I.Introducere De la vechii greci ne-a rămas minunata legendă despre titanul Prometeu, care a răpit cerurilor focul şi l-a adus oamenilor....

I.Generalitati Prin masina electrica, de regula rotativa, întelegem acea masina care converteste puterea electrica în putere mecanica sau...

CAPITOLUL 1 TEHNOLOGII ŞI MĂSURI TEHNOLOGICE CARE CONTRIBUIE LA REALIZAREA UNUI FLUX INTEGRAT TURNARE CONTINUĂ - LAMINARE 1.1 INTRODUCERE Cu...

1. Tema de proiect 1.1. Proiectarea unui sistem de reglare automată de reglarea turaţiei unui motor de curent continuu utilizând regulatoare...

TEMA DE PROIECT Sa se proiecteze un sistem de actionare electrica format dintr-un convertor trifazat, complet comandat in punte si un motor de...

I. Generalităţi Controlul unei maşini-unelte sau utilaj implică domenii cum ar fi tipul de acţionare, modul de control şi limitarea mişcărilor pe...

Folosirea motorului electric pentru acţionarea elicei sau a altui sistem de propulsie reprezintă obiectivul capitolului de faţă. Motorul electric...