
Cuprins
- 1.Prezentarea proiectului ..3
- 2.Motorul de curent continu ..5
- 2.1.Aspecte generale ...5
- 2.2.Modelarea matematică a MCC .7
- 2.3.Reprezentarea grafică a MCC ..11
- 2.4.Bucla interioară 30
- 2.5.Bucla exterioară ...36
- 2.6.Schema în cascadă a MCC ..42
- 3.Concluzii ...47
- 4.Bibliografie 48
- 5.Anexe 49
Extras din proiect
1.Prezentarea proiectului
Tema reprezintă proiectarea unui sistem de reglare automată (SRA) a turației unui motor de curent continuu cu excitație independentă utilizând regulatoare convenționale.
Date inițiale: K=6
Tensiune nominală: Un=(440+K)=446V
Turație : nn=(3000+10∙K)=3000+10∙6=3060 rot/min
Randament: ɳ=0,77+0,01∙K=0,07+0,01∙6=0,83
Puterea nominală : Pn=(11+0,1∙K)=11+0,1∙6=11,6 kw
Momentul de inerție la axul motorului: j=0,0014∙K=0,0084
Date calculate:
Curentul nominal :In=Pnɳ∙Un=11,60,83∙446=11,6370,18=0,031∙103=31A(1.1)
Curentul maxim : Imax=1,7∙31=52,7A (1.2)
Rezistența circuitului rotoric: ????????=0,055∙????????????????=0,055∙44631=0,055∙14,387=0,791 Ω (1.3)
Rezistența bobinei de filtraj: Rf=10Imax=1052,70,189Ω (1.4)
Rezistența totală : ????????=????????+????????=0,791+0,189=0,98Ω (1.5)
UMFST
4
Inductanța circuitului rotoric:????????=5,5????????∙????????2∙????????=5,53060∙4462∙31=0,001∙7,193=0,007 H (1.6)
Inductanța bobinei de filtraj: ????????=0,01∙????=0,01∙6=0,06 H (1.7)
Inductanța totală: Lt=Lr+Lf=0,06+0,007=0,067 H (1.8)
Constanta electrică: ????????=????????−????????∙????????????????=446−0,98∙313060=415,623060=0,135 (1.9)
Constanta mecanică :????????=11,03∙ke=11,03∙0,135=0,970∙0,135=0,13 (1.10)
Constanta de timp electrică: Te=????????????????∙0,0670,98=0,068 (1.11)
Constanta de timp mecanică : ????????=????∙????????????????∙????????=0,0080,017=0,47 (1.12)
UMFST
5
2.Motorul de curent continuu
2.1 Aspecte generale
Servomotoarele electrice sunt mașini electrice caracterizate prin faptul că au momentele de inerție ale motorului de valoare foarte mică ceea ce implică valori extrem de reduse pentru constanta de timp mecanică și valori foarte mici .
Se utilizează in sisteme de control al mișcării. În practică aceste sisteme se regăsesc in aplicații din tehnica de calcul , în robotică ,la mașini cu comandă numerică.
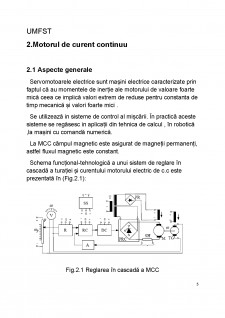
La MCC câmpul magnetic este asigurat de magneții permanenți, astfel fluxul magnetic este constant.
Schema funcțional-tehnologică a unui sistem de reglare în cascadă a turației și curentului motorului electric de c.c este prezentată în (Fig.2.1):
Bibliografie
1. Ingineria sistemelor automate: Teorie și aplicații,Mircea Dulău. - Târgu Mureș, Petru Maior University Press,2016
2. Ingineria sistemelor automate I: Lucrari de laborator-Mircea Dulau, Adrian Gligor, Marius Rusu,2012
3.Introducere în automatică: Mihail Voicu,editura Polirom, București ,2002
4. https://www.mathworks.com/
Preview document















































Conținut arhivă zip
- Bucla exterioara
- buclaexterioara.m
- cuperturb.png
- cuperturbatii.mdl
- farapert.png
- faraperturbatii.mdl
- figperturbatie.png
- figura1.png
- Bucla interioara
- figura.png
- figura1.png
- figura2.png
- motorMCC.m
- schemacuperturbatie.mdl
- schemasimulink.mdl
- Bucla interioara+bucla exterioara
- pertpebuclainterioara.mdl
- perturbatiibuclaexterioara.mdl
- perturbatiipeambelebucle.mdl
- schemafaraperturbatii.mdl
- Motor de curent continuu
- fig1.png
- fig2.png
- fig3.png
- fig4.png
- hs_err_pid11812.log
- matlab.m
- perturbatie.mdl
- regulator.mdl
- simulare.mdl
- Functii.m
- Proiectarea unui SRA.pdf
Alții au mai descărcat și

CAPITOLUL 1 SISTEME DE REGLARE AUTOMATĂ 1.1. Noțiuni introductive Sistemele de reglare automată (SRA) sau pe scurt, automatizarea, sunt des...

CAPITOLUL I SISTEME, MODELE, SIMULARE În matematică, termenul „simulare” a fost folosit pentru prima dată de către John von Neumann şi S. Ulam...

Sistem de reglare automat al turatiei unui motor de curent continuu cu excitatie independenta cu regulatoare conventionale PID. II. Schema de...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

1. Structura generală a unui sistem de conducere automată. Structura principială a unui sistemul cu conducere automată (SCA) rezulta prin...


În conceptia actuala a teoriei sistemelor, rezolvarea problemelor de conducere a proceselor tehnologice presupune parcurgerea câtorva etape cum...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

1. Argument Omul, ca fiinţă superioară, a fost preocupat din cele mai vechi timpuri de a cunoaşte şi stăpâni natura, de a dirija fenomene ale...

1.1 Generalitati Prin automatizarea proceselor de productie se urmareste eliminarea interventiei directe a omului în aceste procese, asigurându-se...

1. Introducere Scopul principal al unei sere este de a îmbunătăți condițiile de mediu în care plantele sunt crescute. Serele permit o monitorizare...

1 Introducere Obiectivul acestei lucrări este studierea unui sistem de reglare automată după stare, aplicat în cadrul unui sistem de laborator,...

1. Tema de proiect 1.1. Proiectarea unui sistem de reglare automată de reglarea turaţiei unui motor de curent continuu utilizând regulatoare...

1.1 Generalităţi Prin automatizarea proceselor de producţie se urmareşte eliminarea intervenţiei directe a omului în aceste procese, asigurându-se...

Introducere Prin nivel se înţelege înălţimea de lichid sau de solid (sub formă de granule sau pulbere) măsurată de la un reper fix până la...

1. SISTEME DE REGLARE AUTOMATĂ (SRA) Întrucât nu este prevăzut un calculator pentru conducere în regim de supra¬veghere, modificarea mărimii de...