Cuprins
- 1. Introducere .3
- 2. Alte aplicații ce au fost realizate pentru a rezolva problema parcurgerii unui traseu prestabilit .7
- 3. Descrierea pieselor.12
- 3.1 Motor de curent continuu .12
- 3.2 Senzori IR .16
- 3.3 Microcontroller ATmega 16 .18
- 3.4 Puntea H .23
- 3.5 Alimentarea robotului .24
- 3.6 Tipuri de conexiuni .29
- 3.7 Șasiul .30
- 3.8 Rezistențe electrice.31
- 3.9 Condensatori . 32
- 3.10 Stabilizator de tensiune (LM7805) .34
- 4. Soluție proprie .36
- 4.1 Interfața de programare .37
- 4.2 Sursa de alimentare .38
- 4.3 Legătura microcontrollerului și schema electrică .41
- 4.4 Interfață serială .43
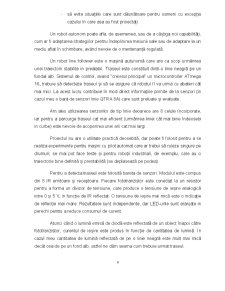
- 4.5 Conectare USB .44
- 4.6 Reazlizarea plăcuței pentru driverului pentru motoare .45
- 5. Concluzii .48
- 6. Listă figuri și referințe .50
- 7. Bibliografie.53
Extras din proiect
1. Introducere
Un robot (din cehă) este un operator mecanic, artificial. Este un sistem compus din mai multe elemenete: partea mecanică, senzori și elemente de execuție (actuatori) și eventual un mecanism de direcționare. Mecanica stabilește înfățișarea robotului și mișcările posibile pe timp de funcționare. Pentru a interacționa cu mediul înconjurător (pentru a prelua date și pentru a le pune în aplicare) are nevoie de senzori si actuatori. Pentru a îndeplini un obiectiv cu succes are nevoie de un mecanism de direcționare care prelucrează informațiile primite de la senzori. Acesta regleaza motoarele și comandă mișcările care trbuiesc efectuate.
Roboții au devenit tot mai avansați de-a lungul timpului, primii roboți construiți fiind capabili să execute un singur obiectiv deoarece erau constrânși de modul în care au fost construiți.
Pentru a putea realiza un robot este nevoie de îmbinarea mai multor științe cum ar fi mecanica, electrotehnica, informatica. Pentru a putea realiza un robot autonom este nevoie și de câteva concepte de inginerie artificială sau neuroinformatică.
Roboții autonomi sunt acei roboți care pot îndepli sarcini dorite în medii nestructurate, fără a avea nevoie de intervenția omului în realizarea obiectivului (capabili să învețe pe baza unei experiențe dobândite în prealabil). Roboții autonomi au grade de autonomie diferită.
Un robot complet automon are capacitatea de a:
- obține informații despre mediul în care își desfășoară activitatea.
- lucra o perioadă îndelungată fără intervenție umană.
- să fie capabili să își mute tot corpul sau părți ale corpului fără asistență umană.
- să evite situațiile care sunt dăunătoare pentru oameni cu excepția cazului în care asa au fost proiectați.
Un robot autonom poate afla, de asemenea, sau de a câștiga noi capabilități, cum ar fi adaptarea strategiilor pentru îndeplinirea misiunii sale sau de adaptare la un mediu aflat în schimbare, având nevoie de o mentenanță regulată.
Un robot line follower este o mașină autunomă care are ca scop urmărirea unei traiectorii stabilite in prealabil. Traseul este constituit dintr-o linie neagră pe un fundal alb. Sistemul de control, avand “creierul principal” un microcontroller ATmega 16, trebuie să detecteze traseul și să se asigure că robotul îl va urma cu abateri cât mai mici. La acest lucru contribuie în mod direct informațiile primite de la senzori (in cazul meu o bară de senzori linie QTRA 8A) care sunt preluate și evaluate.
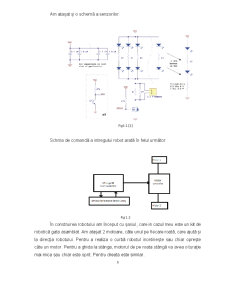
Am ales utilizearea senzorilor de tip linie deoarece are 8 celule încorporate, iar pentru a parcurge traseul cat mai eficient (urmărirea liniei cât mai bine îndeosebi in curbe) este nevoie de acoperirea unei arii cat mai largi.
Proiectul nu are o utilitate practică deosebită, dar poate fi folosit pentru a se realiza experimente pentru mașini cu pilot automat care ar trebui să ruleze singure pe drumuri; se mai pot face teste și pentru roboții industriali, de exemplu, care au o traiectorie bine definită și prestabilită (se deplasează pe podea).
Pentru a detecta traseul este folosită bareta de senzori. Modulul este compus din 8 IR emitoare și receptoare. Fiecare fototranzistor este conectat la un resistor pentru a forma un divizor de tensiune, care produce o tensiune de ieșire analogică intre 0 și 5 V, in funcție de IR reflectat. O tensiune de ieșire mai mică este o indicație de reflecție mai mare. Rezultatele sunt independente, dar LED-urile sunt aranjate in perechi pentru a reduce consumul de curent.
Atunci când o lumină emisă de diodă este reflectată de un obiect înapoi către fototranzistor, curentul de ieșire este produs în funcție de cantitatea de lumină. În cazul meu cantitatea de lumină reflectată de pe o linie neagră este mult mai mică decât cea de pe un fond alb, astfel ne dăm seama cum trebuie urmat traseul.
Preview document



















































Conținut arhivă zip
- Realizarea unui Robot care Urmareste o Traiectorie.pdf
Alții au mai descărcat și

Rezumat Lucrarea de licenţa cu titlul ,,Proiectarea si realizarea unui vehicul autonom cu tracţiune diferenţiala realizată cu motoare pas cu pas’’...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...
Rezumat Lucrarea de licenţa cu titlul ,,Proiectarea si realizarea unui vehicul autonom cu tracţiune diferenţiala realizată cu motoare pas cu pas’’...

1.Introducere Construcţia unui robot cere cunoştinţe din domenii foarte diferite. Pentru a îndeplini chiar o misiune foarte simplă, este nevoie...

INTRODUCERE În cursul ultimelor două decenii, cercetatorii in roboti mobili au avut de aface cu diferite metode de planificare.In majoritatea...

1.1. Scurt istoric al apariţiei şi dezvoltării sistemelor de fabricaţie flexibilă (SFF) În analiza evoluţiei modelului dominant aplicat...

CAPITOLUL I . Schema bloc a unui robot Fig.nr.1.1.Sistemul robot Definiţie : sistemul este un ansamblu de elemente interconectate astfel încât...