Cuprins
- 1. Modelare matematică.4
- 2. Proiectarea unui regulator PID.8
- 3. Locul rădăcinilor.14
- 4. Proiectarea in LQR.20
- 5. Determinarea caracteristicilor Bode şi a marginilor de câştig şi de fază.24
- 6. Determinarea diagramelor Nichols şi a marginilor de fază şi de câştig. Comparaţie cu 5.30
- 7. Proiectarea unui controler robust.35
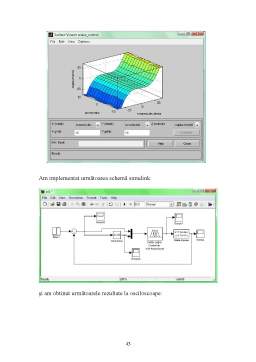
- 8. Proiectarea unui controler fuzzy.40
Extras din proiect
Schema de principiu
Introducere
• Modelul sistemului de reglare automată a vitezei unui automobil este relativ simplu.
• Dacă inerţia roţilor este neglijată şi dacă se presupune că forţa de frecare (care este proporţională cu viteza automobilului) este singura care se opune mişcării automobilului, atunci problema este redusă la un sistem simplu cum apare in schema de principiu.
Preliminarii
• m - masa automobilului=1200 kg
• u- forţa motorului=600 N
• bv-forţa de frecare=60 Ns/m
Ecuaţiile sistemului
Folosind legea lui Newton, ecuaţiile de modelare pentru acest sitem devin:
m + bv=u
y=v
unde u este forţa motorului
Criterii de proiectare pentru această problemă sunt:
Timpul de creştere < 5 sec
Suprareglaj < 10%
Eroarea stării de echilibru< 2%
Funcţia de transfer
Pentru a determina funcţia de transfer a sistemului de mai sus, întai trebuie să aplicăm transformata Laplace ecuaţiilor sistemului.
Transformatele Laplace ale celor doua ecuaţii sunt:
Deoarece ieşirea este viteza, sa inlocuim V(s) cu Y(s)
Funcţia de transfer a sistemului devine:
Pentru a rezolva această problemă folosind Matlab copiem următoarele comenzi intr-un fişier cu extensia m:
m=1200;
b=60;
u=600;
num=[1];
den=[m b];
Spatiul stărilor
Putem rescrie ecuaţiile sistemului in spaţiul stărilor sub următoarea forma:
Pentru a folosi Matlab pentru a rezolva această problemă copiem următoarele comenzi intr-un fişier cu extensia m
m = 1200;
b = 60;
u = 600;
A = [-b/m];
B = [1/m];
C = [1];
D = 0;
Răspunsul in buclă deschisă
Acum să vedem cum sistemul in buclă deschisă răspunde la o intrare treaptă. Adăugăm următoarea comandă in fişierul cu extensia m scris pentru funcţia de transfer si rulăm fisierul
step (u*num,den)
Ar trebuie sa apară următoarea afişare grafică:
Pentru a folosi fişierul cu extensia m scris pentru spatiul stărilor adăugăm urmatoarea comandă in fişierul cu extensia m si apoi rulam fişierul.
Afişarea grafică obţinută ar trebui să fie identică cu cea de mai sus.
Din afişarea grafică putem observa ca automobilului îi trebuiesc mai mult de 100 secunde pentru a ajunge la viteza stării de echilibru de 10 m/s. Aceasta nu satisface unul din criteriile noastre de proiectare unde timpul de creştere este mai mic de 5 secunde.
Funcţia de transfer in buclă inchisă
Pentru a rezolva această problemă un controller de reacţie va fi adăugat pentru a imbunătăti performanţele sistemului. Figura de mai jos este diagrama bloc a unui sistem unitar tipic cu reacţie.
Preview document













































Conținut arhivă zip
- Reglarea Vitezei unui Automobil - Cruise Control.doc
Alții au mai descărcat și

Capitol 1 Introducere 1.1Motivaţie La nivel mondial există tendinţa de creştere a numărului de autovehicule aflate în exploatare cu implicaţie...

1.INTRODUCERE Proiectul reprezintă realizarea unui Controller PD cu ajutorul tehnici Fuzzy.Pentru realizarea Controllerului Fuzzy s-a folosit atât...

Argument Tema proiectului meu „Utilizarea senzorilor de proximitate” face parte integrantă din domeniul pregătirii mele profesionale pentru...

Modelarea suspensiei active a unui automobile este o problema de reglare interesanta.Cand sistemul de supensie este realizat ,modelul ¼ (o roata...

Menţinerea automată a distanţei optimale între automobile este una dintre apli¬caţiile care va avea cu siguranţă o largă aplicabilitate pe...

1. Modelare matematică 2. Proiectarea unui regulator PID 3. Locul rădăcinilor 4. Proiectarea in LQR 5. Determinarea caracteristicilor Bode şi a...

1. Introducere 1.1 Enuntul problemei Se da un automobil care are functia de cruise control inplementata, si se doreste studierea problemei si a...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...
Te-ar putea interesa și

Capitolul 1 Introducere Revoluția informatică (a doua revoluție industrială) a marcat saltul de la societatea industrializată la societatea...
1. Introducere 1.1 Enuntul problemei Se da un automobil care are functia de cruise control inplementata, si se doreste studierea problemei si a...

1 INTRODUCERE În timp, în raport cu nivelul atins de dezvoltarea tehnologică şi a posibilităţilor de utilizare la fabricarea automobilelor, se...